Содержание
GPS и ГЛОНАСС
Аббревиатура GPS (не путать с GPRS) стала для многих синонимом навигации. Если какое-то время тому назад для навигации покупались специальные устройства, GPS-приемники, то сейчас они встраиваются в различные приборы — мобильные телефоны, планшеты; часто автомобили поступают с навигационными системами.
В то же время, сейчас все чаще упоминается другая аббревиатура, ГЛОНАСС, и, как выясняется, она также обозначает собой навигационную систему. В чем же сходства и различия между этими системами? Как вообще работают системы навигации? Об этот и пойдет речь в данной статье.
Расшифровка и принцип работы
GPS расшифровывается как «Global Positioning System» — глобальная система позиционирования.
ГЛОНАСС — как «ГЛОбальная НАвигационная Спутниковая Система». Что интересно, латинизация аббревиатуры приводит
также к корректной аббревиатуре GLONASS — «GLObal NAvigation Satellite System».
Таким образом, мы имеет две независимых системы спутниковой навигации. И в том, и в другом случае смысл состоит в том,
И в том, и в другом случае смысл состоит в том,
что на орбите Земли находится определенное количество искусственных спутников, сигналы от которых и получает
ваш приемник (например, мобильник). По частоте сигнала он определяет расстояние до спутников, из содержания сигнала
получает информацию о их местонахождении. При наличии трех (а, желательно, четырех) спутников решается геометрическая
задача и определяется ваше местонахождение.
Немного истории
Система GPS изначально разрабатывалась американскими военными. В 1983 она была сделана публичной, но без определенного
кода доступа вы получали координаты спутника с урезанной точностью, что приводило неточному определению координат.
В 2000 году ограничение точности было отменено. С тех пор существенно возросла популярность GPS-приемников,
сейчас почти в каждом выпускаемом мобильнике есть такая опция.
В свою очередь, система ГЛОНАСС была советским военным проектом. После распадения Советского Союза из-за нехватки
финансирования проект был более-менее свернут, и к 2000 году на орбите оставалось 6 спутников из 24, из-за
чего пользоваться системой было практически невозможно. Далее система снова получила финансирование,
Далее система снова получила финансирование,
и к концу 2011 года мы имеем ситуацию, когда на орбите снова находится 24 спутника, не считая резервные.
Технологии
Для пользователя принципиальных различий между GPS и ГЛОНАСС нет. И в том, и в другом случае, устройство должно
уметь получать сигналы от спутника и правильно их интерпретировать. Однако, в связи с тем, что система ГЛОНАСС была
выведена на публичный рабочий режим существенно позже, GPS-приемники намного более распространены, и их цена также
существенно ниже. Что будет дальше — покажет время.
Также существуют технологии, помогающие GPS-приемнику быстрее найти свое местонахождение после включения.
Ведь прежде чем получить сигналы от спутников, приемнику нужно просканировать различные диапазоны.
Кроме того, после включения он не знает, где именно находятся спутники, тем самым ему требуется больше информации,
чем если бы слежение не прерывалось. Группа технологий, ассистирующих приемнику в задаче поиска называется
LBS — Location Based Service. Наиболее известными являются:
Наиболее известными являются:
- Cell of Origin — метод, применяющийся в случае наличия у GPS-приемника доступа к сети сотовой связи (например,
в случае мобильника). Если сотовая сеть выдает информацию о местоположении базовой станции, с которой связалось
устройство, то эта информация может помочь в начальном поиске. Существуют и продвинутые модификации этого метода,
берущие информацию о нескольких базовых станциях; - A-GPS — если у приемника есть доступ в интернет, то он может получить информацию о местонахождении
спутников из интернета, а не от них самих. Тем не менее, он будет ждать сигнала от спутников с тем, чтобы определить
расстояние до них.
Стоит также прояснить часто упоминающиеся термины «холодный старт» и «горячий старт» GPS-приемника.
В первом случае речь идет о включении, когда устройство не содержит вообще никакой информации о спутниках,
например после покупки. «Горячий старт» — это когда навигационный модуль уже использовался ранее,
но устройство было выключено и включено снова. В таком случае уже сохранившаяся в памяти устройства
В таком случае уже сохранившаяся в памяти устройства
информация о спутниках может помочь найти их быстрее. «Горячий старт» — понятие относительное,
чем дольше устройство было выключено, тем меньшую пользу принесет эта информация.
Законодательство
Законы — вещь переменчивая. Поэтому последняя часть статьи может быстро потерять актуальность.
Тем не менее, нельзя не сказать, что недавно был принят закон,
по которому с 1 января 2012 года все маршрутные транспортные средства должны быть оснащены системами
ГЛОНАСС-навигации. Правда, требовать это в реальности начнут с 1 июля.
В планах правительства также и введение закона об обязательном наличии ГЛОНАСС-навигаторов на всех автомобилях.
Кстати, «люксовую» модификацию автомашины Лада Приора уже сейчас оснащают ГЛОНАСС-навигатором.
Еще один обсуждающийся сейчас «интересный» закон — планируется введение пошлин на ввоз
GPS-навигаторов, не умеющих использовать систему ГЛОНАСС. Пошлины могут быть установлены в размере 25%.![]()
Под эти пошлины могут попасть все GPS-приемники, включая мобильники, IPhone и IPad.
Но что интересно, компания Apple не стоит на месте,
последнее поколение мобильника IPhone4S объявлено как поддерживающее систему ГЛОНАСС.
А у вас есть GPS-приемник? А ГЛОНАСС?
Please enable JavaScript to view the comments powered by Disqus.comments powered by Disqus
Система GPS. Взгляд изнутри и снаружи
Немного истории.
Как нередко бывает с высокотехнологичными проектами, инициаторами разработки и реализации системы GPS (Global Positioning System — система глобального позиционирования) стали военные. Проект спутниковой сети для определения координат в режиме реального времени в любой точке земного шара был назван Navstar (Navigation system with timing and ranging — навигационная система определения времени и дальности), тогда как аббревиатура GPS появилась позднее, когда система стала использоваться не только в оборонных, но и в гражданских целях.
Первые шаги по развертыванию навигационной сети были предприняты в середине семидесятых, коммерческая же эксплуатация системы в сегодняшнем виде началась с 1995 года. В настоящий момент в работе находятся 28 спутников, равномерно распределенных по орбитам с высотой 20350 км (для полнофункциональной работы достаточно 24 спутников).
Несколько забегая вперед, скажу, что поистине ключевым моментом в истории GPS стало решение президента США об отмене с 1 мая 2000 года режима так называемого селективного доступа (SA — selective availability) — погрешности, искусственно вносимой в спутниковые сигналы для неточной работы гражданских GPS-приемников. С этого момента любительский терминал может определять координаты с точностью в несколько метров (ранее погрешность составляла десятки метров)! На рис.1 представлены ошибки в навигации до и после отключения режима селективного доступа (данные U.S. Space Command ).Рис1.
Попробуем разобраться в общих чертах, как устроена система глобального позиционирования, а потом коснемся ряда пользовательских аспектов. Рассмотрение же начнем с принципа определения дальности, лежащего в основе работы космической навигационной системы.
Рассмотрение же начнем с принципа определения дальности, лежащего в основе работы космической навигационной системы.
Алгоритм измерения расстояния от точки наблюдения до спутника.
Дальнометрия основана на вычислении расстояния по временной задержке распространения радиосигнала от спутника к приемнику. Если знать время распространения радиосигнала, то пройденный им путь легко вычислить, просто умножив время на скорость света.
Каждый спутник системы GPS непрерывно генерирует радиоволны двух частот — L1=1575.42МГц и L2=1227.60МГц. Мощность передатчика составляет 50 и 8 Ватт соответственно. Навигационный сигнал представляет собой фазовоманипулированный псевдослучайный код PRN (Pseudo Random Number code). PRN бывает двух типов: первый, C/A-код (Coarse Acquisition code — грубый код) используется в гражданских приемниках, второй Р-код (Precision code — точный код), используется в военных целях, а также, иногда, для решения задач геодезии и картографии. Частота L1 модулируется как С/А, так и Р-кодом, частота L2 существует только для передачи Р-кода. Кроме описанных, существует еще и Y-код, представляющий собой зашифрованный Р-код (в военное время система шифровки может меняться).
Кроме описанных, существует еще и Y-код, представляющий собой зашифрованный Р-код (в военное время система шифровки может меняться).
Период повторения кода довольно велик (например, для P-кода он равен 267 дням). Каждый GPS-приемник имеет собственный генератор, работающий на той же частоте и модулирующий сигнал по тому же закону, что и генератор спутника. Таким образом, по времени задержки между одинаковыми участками кода, принятого со спутника и сгенерированного самостоятельно, можно вычислить время распространения сигнала, а, следовательно, и расстояние до спутника.
Одной из основных технических сложностей описанного выше метода является синхронизация часов на спутнике и в приемнике. Даже мизерная по обычным меркам погрешность может привести к огромной ошибке в определении расстояния. Каждый спутник несет на борту высокоточные атомные часы. Понятно, что устанавливать подобную штуку в каждый приемник невозможно. Поэтому для коррекции ошибок в определении координат из-за погрешностей встроенных в приемник часов используется некоторая избыточность в данных, необходимых для однозначной привязки к местности (подробней об этом чуть позже).
Кроме самих навигационных сигналов, спутник непрерывно передает разного рода служебную информацию. Приемник получает, например, эфемериды (точные данные об орбите спутника), прогноз задержки распространения радиосигнала в ионосфере (так как скорость света меняется при прохождении разных слоев атмосферы), а также сведения о работоспособности спутника (так называемых «альманах», содержащий обновляемые каждые 12.5 минут сведения о состоянии и орбитах всех спутников). Эти данные передаются со скоростью 50 бит/с на частотах L1 или L2.
Общие принципы определения координат с помощью GPS.
Основой идеи определения координат GPS-приемника является вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные содержатся в принятом со спутника альманахе). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется трилатерацией. Рис2.
Если известно расстояние А до одного спутника, то координаты приемника определить нельзя (он может находится в любой точке сферы радиусом А, описанной вокруг спутника). Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным — объект находится где-то на окружности (она показана синим цветом на рис.2), которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными синими точками на рис.2). Этого уже достаточно для однозначного определения координат — дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близи от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, теоретически для трехмерной навигации достаточно знать расстояния от приемника до трех спутников.
Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным — объект находится где-то на окружности (она показана синим цветом на рис.2), которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными синими точками на рис.2). Этого уже достаточно для однозначного определения координат — дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близи от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, теоретически для трехмерной навигации достаточно знать расстояния от приемника до трех спутников.
Однако в жизни все не так просто. Приведенные выше рассуждения были сделаны для случая, когда расстояния от точки наблюдения до спутников известны с абсолютной точностью. Разумеется, как бы ни изощрялись инженеры, некоторая погрешность всегда имеет место (хотя бы по указанной в предыдущем разделе неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и т. п.). Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника.
п.). Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника.
Получив сигнал от четырех (или больше) спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.
Следует отметить, что точность определения координат связана не только с прецизионным расчетом расстояния от приемника до спутников, но и с величиной погрешности задания местоположения самих спутников. Для контроля орбит и координат спутников существуют четыре наземных станции слежения, системы связи и центр управления, подконтрольные Министерству Обороны США. Станции слежения постоянно ведут наблюдения за всеми спутниками системы и передают данные об их орбитах в центр управления, где вычисляются уточнённые элементы траекторий и поправки спутниковых часов. Указанные параметры вносятся в альманах и передаются на спутники, а те, в свою очередь, отсылают эту информацию всем работающим приемникам.
Кроме перечисленных, существует еще масса специальных систем, увеличивающих точность навигации, — например, особые схемы обработки сигнала снижают ошибки от интерференции (взаимодействия прямого спутникового сигнала с отраженным, например, от зданий). Мы не будем углубляться в особенности функционирования этих устройств, чтобы излишне не осложнять текст.
После отмены описанного выше режима селективного доступа гражданские приемники «привязываются к местности» с погрешностью 3-5 метров (высота определяется с точностью около 10 метров). Приведенные цифры соответствуют одновременному приему сигнала с 6-8 спутников (большинство современных аппаратов имеют 12-канальный приемник, позволяющий одновременно обрабатывать информацию от 12 спутников).
Качественно уменьшить ошибку (до нескольких сантиметров) в измерении координат позволяет режим так называемой дифференциальной коррекции (DGPS — Differential GPS). Дифференциальный режим состоит в использовании двух приемников — один неподвижно находится в точке с известными координатами и называется «базовым», а второй, как и раньше, является мобильным. Данные, полученные базовым приемником, используются для коррекции информации, собранной передвижным аппаратом. Коррекция может осуществляться как в режиме реального времени, так и при «оффлайновой» обработке данных, например, на компьютере.
Данные, полученные базовым приемником, используются для коррекции информации, собранной передвижным аппаратом. Коррекция может осуществляться как в режиме реального времени, так и при «оффлайновой» обработке данных, например, на компьютере.
Обычно в качестве базового используется профессиональный приемник, принадлежащий какой-либо компании, специализирующейся на оказании услуг навигации или занимающейся геодезией. Например, в феврале 1998 года недалеко от Санкт-Петербурга компания «НавГеоКом» установила первую в России наземную станцию дифференциального GPS. Мощность передатчика станции — 100 Ватт (частота 298,5 кГц), что позволяет пользоваться DGPS при удалении от станции на расстояния до 300 км по морю и до 150 км по суше. Кроме наземных базовых приемников, для дифференциальной коррекции GPS-данных можно использовать спутниковую систему дифференциального сервиса компании OmniStar. Данные для коррекции передаются с нескольких геостационарных спутников компании.
Следует заметить, что основными заказчиками дифференциальной коррекции являются геодезические и топографические службы — для частного пользователя DGPS не представляет интереса из-за высокой стоимости (пакет услуг OmniStar на территории Европы стоит более 1500 долларов в год) и громоздкости оборудования. Да и вряд ли в повседневной жизни возникают ситуации, когда надо знать свои абсолютные географические координаты с погрешностью 10-30 см.
Да и вряд ли в повседневной жизни возникают ситуации, когда надо знать свои абсолютные географические координаты с погрешностью 10-30 см.
В заключение части, повествующей о «теоретических» аспектах функционирования GPS, скажу, что Россия и в случае с космической навигацией пошла своим путем и развивает собственную систему ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система). Но из-за отсутствия должных инвестиций в настоящее время на орбите находятся лишь семь спутников из двадцати четырех, необходимых для нормального функционирования системы…
Краткие субъективные заметки пользователя GPS.
Так уж получилось, что о возможности определять свое местоположение с помощью носимого приборчика размерами с сотовый телефон я узнал году в девяносто седьмом из какого-то журнала. Однако замечательные перспективы, нарисованные авторами статьи, были безжалостно разбиты заявленной в тексте ценой навигационного аппарата — почти 400 долларов!
Года через полтора (в августе 1998) судьба занесла меня в маленький спортивный магазинчик в американском городе Бостон. Какого же было мое удивление и радость, когда на одной из витрин я случайно заметил несколько разных навигаторов, самый дорогой из которых стоил 250 долларов (простенькие же модели предлагались за $99). Конечно, уйти из магазина без прибора я уже не мог, поэтому принялся пытать продавцов о характеристиках, преимуществах и недостатках каждой модели. Ничего вразумительного от них я не услышал (и отнюдь не из-за того, что плохо знаю английский), так что пришлось разбираться во всем самому. И в результате, как это нередко бывает, была приобретена самая продвинутая и дорогая модель — Garmin GPS II+, а также специальный чехол к ней и шнур для питания от гнезда прикуривателя автомобиля. В магазине имелось еще два аксессуара для теперь уже моего аппарата — устройство для крепления навигатора на велосипедном руле и шнур для соединения с РС. Последний я долго крутил в руках, но, в конце концов, все же решил не покупать из-за немалой цены (немногим более 30 долларов). Как потом оказалось, шнур я не купил совершенно правильно, ибо все взаимодействие прибора с компьютером сводится к «сливке» в ЭВМ пройденного маршрута (а также, думаю, координат в режиме реального времени, но насчет этого есть определенные сомнения), да и то при условии покупки софта от Garmin.
Какого же было мое удивление и радость, когда на одной из витрин я случайно заметил несколько разных навигаторов, самый дорогой из которых стоил 250 долларов (простенькие же модели предлагались за $99). Конечно, уйти из магазина без прибора я уже не мог, поэтому принялся пытать продавцов о характеристиках, преимуществах и недостатках каждой модели. Ничего вразумительного от них я не услышал (и отнюдь не из-за того, что плохо знаю английский), так что пришлось разбираться во всем самому. И в результате, как это нередко бывает, была приобретена самая продвинутая и дорогая модель — Garmin GPS II+, а также специальный чехол к ней и шнур для питания от гнезда прикуривателя автомобиля. В магазине имелось еще два аксессуара для теперь уже моего аппарата — устройство для крепления навигатора на велосипедном руле и шнур для соединения с РС. Последний я долго крутил в руках, но, в конце концов, все же решил не покупать из-за немалой цены (немногим более 30 долларов). Как потом оказалось, шнур я не купил совершенно правильно, ибо все взаимодействие прибора с компьютером сводится к «сливке» в ЭВМ пройденного маршрута (а также, думаю, координат в режиме реального времени, но насчет этого есть определенные сомнения), да и то при условии покупки софта от Garmin. Возможность загружать в прибор карты, к сожалению, отсутствует.
Возможность загружать в прибор карты, к сожалению, отсутствует.
Давать подробное описание своего прибора я не буду хотя бы потому, что он уже снят с производства (желающие ознакомиться с подробной технической характеристикой могут сделать это здесь ). Замечу лишь, что вес навигатора — 255 гр., размеры — 59х127х41 мм. Благодаря своему треугольному сечению аппарат исключительно устойчиво располагается на столе или панели приборов автомобиля (для более прочной фиксации в комплект входит липучка Velcro). Питание осуществляется от четырех пальчиковых батареек АА (их хватает лишь на 24 часа непрерывной работы) или внешнего источника. Попробую рассказать об основных возможностях моего прибора, которые, думаю, имеет подавляющее большинство присутствующих на рынке навигаторов.
С первого взгляда GPS II+ можно принять за мобильный телефон, выпущенный пару лет назад. Лишь только присмотревшись, замечаешь необычно толстую антенну, огромный дисплей (56х38 мм!) и малое, по телефонным меркам, количество клавиш.
При включении прибора начинается процесс сбора информации со спутников, а на экране появляется простенькая мультипликация (вращающийся земной шар). После первоначальной инициализации (которая в открытом месте занимает пару минут) на дисплее возникает примитивная карта неба с номерами видимых спутников, а рядом — гистограмма, свидетельствующая об уровне сигнала от каждого спутника. Кроме того, указывается погрешность навигации (в метрах) — чем больше спутников видит прибор, тем, разумеется, точнее будет определение координат.
Интерфейс GPS II+ построен по принципу «перелистываемых» страниц (для этого даже есть специальная кнопка PAGE). Выше была описана «страница спутников», а кроме нее, есть «страница навигации», «карта», «страница возврата», «страница меню» и ряд других. Следует заметить, что описываемый аппарат не русифицирован, однако даже с плохим знанием английского можно понять его работу.
На странице навигации отображаются: абсолютные географические координаты, пройденный путь, мгновенная и средняя скорости движения, высота над уровнем моря, время движения и, в верхней части экрана, электронный компас. Надо сказать, что высота определяется с гораздо большей погрешностью, чем две горизонтальные координаты (на этот счет есть даже специальная ремарка в руководстве пользователя), что не позволяет использовать GPS, например, для определения высоты парапланеристами. Зато мгновенная скорость вычисляется исключительно точно (особенно для быстродвижущихся объектов), что дает возможность использовать прибор для определения скорости снегоходов (спидометры которых имеют обыкновение значительно врать). Могу дать «вредный совет» — взяв напрокат автомобиль, отключите его спидометр (чтобы он насчитал поменьше километров — ведь оплата зачастую пропорциональна пробегу), а скорость и пройденное расстояние определяйте по GPS (благо он может вести измерения как в милях, так и в километрах).
Надо сказать, что высота определяется с гораздо большей погрешностью, чем две горизонтальные координаты (на этот счет есть даже специальная ремарка в руководстве пользователя), что не позволяет использовать GPS, например, для определения высоты парапланеристами. Зато мгновенная скорость вычисляется исключительно точно (особенно для быстродвижущихся объектов), что дает возможность использовать прибор для определения скорости снегоходов (спидометры которых имеют обыкновение значительно врать). Могу дать «вредный совет» — взяв напрокат автомобиль, отключите его спидометр (чтобы он насчитал поменьше километров — ведь оплата зачастую пропорциональна пробегу), а скорость и пройденное расстояние определяйте по GPS (благо он может вести измерения как в милях, так и в километрах).
Средняя скорость движения определяется по несколько странному алгоритму — время простоя (когда мгновенная скорость равна нулю) в вычислениях не учитывается (более логично, на мой взгляд, было бы просто делить пройденное расстояние на общее время поездки, но создатели GPS II+ руководствовались каким-то иными соображениями).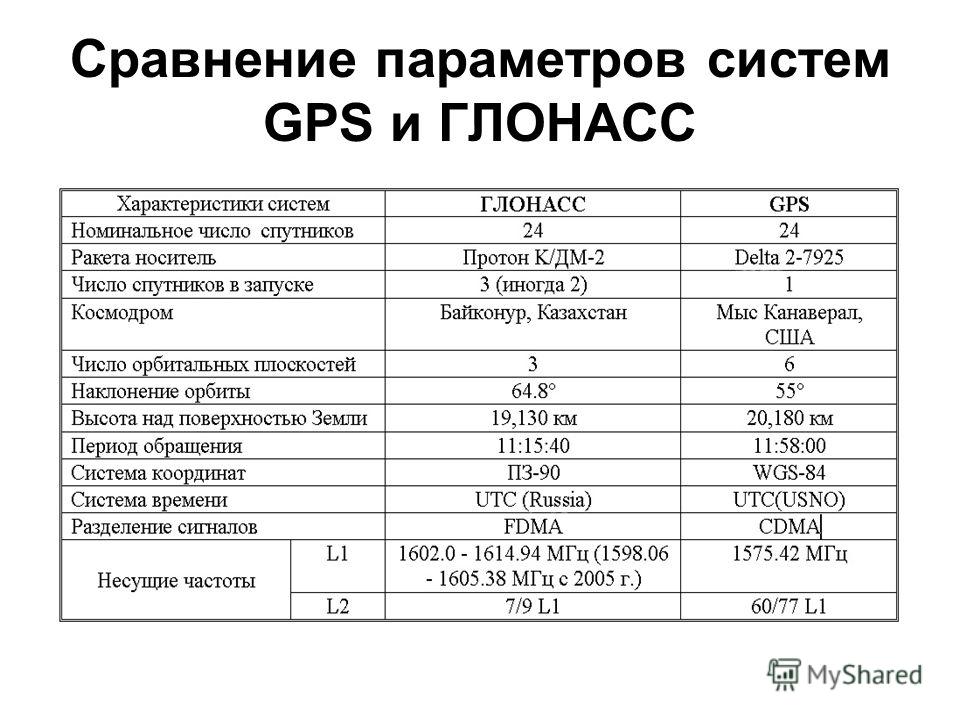
Пройденный путь отображается на «карте» (памяти аппарата хватает километров на 800 — при большем пробеге автоматически стираются самые старые метки), так что при желании можно посмотреть схему своих блужданий. Масштаб карты меняется от десятков метров до сотен километров, что, несомненно, исключительно удобно. Самое же замечательное состоит в том, что в памяти прибора имеются координаты основных населенных пункты всего мира! США, конечно, представлено более подробно (например, все районы Бостона присутствуют на карте с названиями), чем Россия (тут указано расположение лишь таких городов как Москва, Тверь, Подольск и т.п.). Представьте, например, что Вы направляетесь из Москвы в Брест. Находите в памяти навигатора «Брест», жмете специальную кнопку «GO TO», и на экране появляется локальное направление Вашего движения; глобальное направление на Брест; количество километров (по прямой, разумеется), оставшееся до точки назначения; средняя скорость и расчетное время прибытия. И так в любой точке мира — хоть в Чехии, хоть в Австралии, хоть в Таиланде…
Не менее полезной является так называемая функция возврата. Память аппарата позволяет записывать до 500 ключевых точек (waypoints). Каждую точку пользователь может называть по своему усмотрению (например, DOM, DACHA и т.п.), также предусмотрены различные пиктрограммки для отображения информации на дисплее. Включив функцию возврата к точке (любой из заранее записанных), владелец навигатора получает те же возможности, что и в описанном выше случае с Брестом (т.е. расстояние до точки, расчетное время прибытия и все остальное). У меня, например, был такой случай. Приехав в Прагу на автомобиле и устроившись в гостинице, мы с приятелем отправились в центр города. Оставив машину на стоянке, пошли побродить. После бесцельной трехчасовой прогулки и ужина в ресторане мы поняли, что совершенно не помним, где оставили машину. На улице ночь, мы — на одной из маленьких улочек незнакомого города… К счастью, прежде чем покинуть автомобиль, я записал его местоположение в навигатор. Теперь же, нажав пару кнопок на аппарате, я узнал, что машина стоит в 500 метрах от нас и через 15 минут мы уже слушали тихую музыку, направляясь на автомобиле в гостиницу.
Память аппарата позволяет записывать до 500 ключевых точек (waypoints). Каждую точку пользователь может называть по своему усмотрению (например, DOM, DACHA и т.п.), также предусмотрены различные пиктрограммки для отображения информации на дисплее. Включив функцию возврата к точке (любой из заранее записанных), владелец навигатора получает те же возможности, что и в описанном выше случае с Брестом (т.е. расстояние до точки, расчетное время прибытия и все остальное). У меня, например, был такой случай. Приехав в Прагу на автомобиле и устроившись в гостинице, мы с приятелем отправились в центр города. Оставив машину на стоянке, пошли побродить. После бесцельной трехчасовой прогулки и ужина в ресторане мы поняли, что совершенно не помним, где оставили машину. На улице ночь, мы — на одной из маленьких улочек незнакомого города… К счастью, прежде чем покинуть автомобиль, я записал его местоположение в навигатор. Теперь же, нажав пару кнопок на аппарате, я узнал, что машина стоит в 500 метрах от нас и через 15 минут мы уже слушали тихую музыку, направляясь на автомобиле в гостиницу.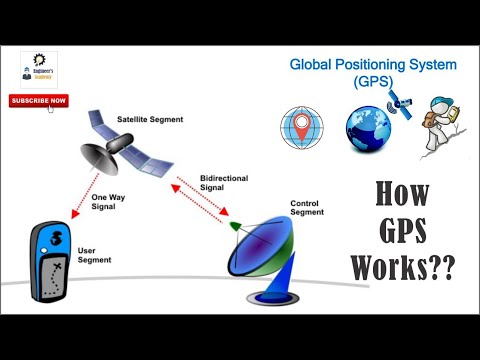
Кроме движения к записанной метке по прямой, что не всегда удобно в условиях города, Garmin предлагает функцию TrackBack — возврат по своему пути. Грубо говоря, кривая движения аппроксимируется рядом прямолинейных участков, а в точках излома ставятся метки. На каждом прямолинейном участке навигатор ведет пользователя к ближайшей метке, по достижении же ее осуществляется автоматическое переключение на следующую метку. Исключительно удобная функция при езде на автомобиле по незнакомой местности (сигнал со спутников сквозь здания, конечно, не проходит, поэтому, чтобы получить данные о своих координатах в условиях плотной застройки, приходится искать более-менее открытое место).
Я не буду дальше углубляться в описание возможностей прибора — поверьте, что кроме описанных, в нем есть еще масса приятных и нужных примочек. Одна смена ориентации дисплея чего стоит — можно использовать аппарат как в горизонтальном (автомобильном), так и в вертикальном (пешеходном) положении (см. рис. 3).
3).
Одной из основных же прелестей GPS для пользователя я считаю отсутствие какой-либо платы за пользование системой. Купил один раз прибор — и наслаждайся!
Заключение.
Я думаю, нет нужды перечислять области применения рассмотренной системы глобального позиционирования. GPS-приемники встраивают в автомобили, сотовые телефоны и даже наручные часы! Недавно я встретил сообщение о разработке чипа, совмещающего в себе миниатюрный GPS-приемник и модуль GSM — устройствами на его базе предлагается оснащать собачьи ошейники, чтобы хозяин мог без труда обнаружить потерявшегося пса посредством сотовой сети.
Но в любой бочке меда есть ложка дегтя. В данном случае в роли последнего выступают российские законы. Я не буду подробно рассуждать о юридических аспектах использования GPS-навигаторов в России (кое-что об этом можно найти здесь ), замечу лишь, что теоретически высокоточные навигационные приборы (коими, без сомнения являются даже любительские GPS-приемники) у нас запрещены, а их владельцев ждет конфискация аппарата и немалый штраф.
К счастью для пользователей, в России строгость законов компенсируется необязательностью их выполнения — например, по Москве разъезжает огромное количество лимузинов с шайбой-антенной GPS-приемников на крышке багажника. Все более-менее серьезные морские суда оборудованы GPS (и уже выросло целое поколение яхтсменов, с трудом ориентирующихся в пространстве по компасу и прочим традиционным средствам навигации). Надеюсь, власти не будут вставлять палки в колеса техническому прогрессу и в ближайшее время легализуют пользование GPS-приемниками в нашей стране (отменили же разрешения на сотовые телефоны), а также дадут добро на рассекречивание и тиражирование подробных карт местности, необходимых для полноценного использования автомобильных навигационных систем.
Расшифровка сигнала GPS | Основы GPS | Как работает GPS
Приемник GPS определяет свое положение с помощью процесса, называемого трилатерацией . Это проще всего понять, если мы сначала рассмотрим простой случай (рис.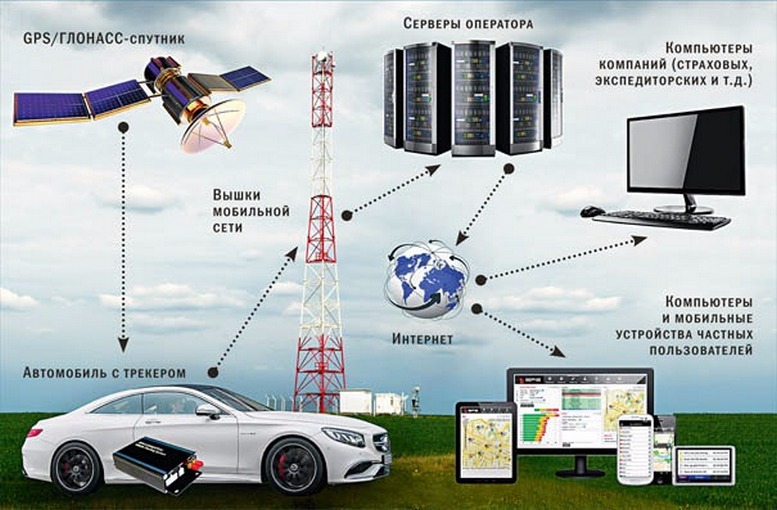 1). Представьте, что сигналы, подобные GPS, передаются с радиовышек во Фресно, Лос-Анджелесе и Лас-Вегасе. Допустим, вы можете декодировать сигналы, чтобы знать, как далеко вы находитесь от каждой передающей башни (R1, R2 и R3). Используйте известное расстояние в качестве радиуса для рисования круга вокруг каждой башни. Если у вас есть сигналы только для Лас-Вегаса и Лос-Анджелеса, вы можете оказаться в одной из двух точек пересечения этих двух кругов. Но если добавить «спутник» из Фресно, то можно понять, где именно вы находитесь, потому что точка пересечения всех трех окружностей всего одна. На рис. 2 показана реальная версия трилатерации GPS. Вместо кругов подумайте о том, что каждый сигнал спутника GPS определяет сферу. Приемник GPS на Земле находится на пересечении этих сфер.
1). Представьте, что сигналы, подобные GPS, передаются с радиовышек во Фресно, Лос-Анджелесе и Лас-Вегасе. Допустим, вы можете декодировать сигналы, чтобы знать, как далеко вы находитесь от каждой передающей башни (R1, R2 и R3). Используйте известное расстояние в качестве радиуса для рисования круга вокруг каждой башни. Если у вас есть сигналы только для Лас-Вегаса и Лос-Анджелеса, вы можете оказаться в одной из двух точек пересечения этих двух кругов. Но если добавить «спутник» из Фресно, то можно понять, где именно вы находитесь, потому что точка пересечения всех трех окружностей всего одна. На рис. 2 показана реальная версия трилатерации GPS. Вместо кругов подумайте о том, что каждый сигнал спутника GPS определяет сферу. Приемник GPS на Земле находится на пересечении этих сфер.
Теперь вам нужно задать себе два больших вопроса:
Рис. 1. Демонстрация трилатерации. Если пользователь знает свое расстояние (R1, R2, R3) от трех передающих вышек в Лос-Анджелесе, Фресно и Лас-Вегасе, он может рассчитать свое местоположение.
Рис. 2. Местоположение GPS-приемника (зеленый цвет) — это пересечение трех сфер (красный цвет). Четвертый спутник (показан желтой линией) дает вам время.
Сигнал GPS был разработан специально для того, чтобы ответить на эти два вопроса. Каждый спутник GPS отправляет уникальный код. Этот код представляет собой последовательность единиц и нулей (рис. 3). GPS-приемник в вашем автомобиле или телефоне имеет копию каждого спутникового кода. Когда приходят сигналы GPS, электроника приемника должна выяснить, какие спутники их послали. Он тщательно сравнивает полученные GPS-сигналы с кодами всех известных ему спутников. Как только приемник идентифицировал каждый спутник, он сдвигает коды, чтобы выровнять полученный код с кодом в своей памяти. Сдвиг представляет собой количество времени, которое потребовалось спутниковому коду для достижения приемника. Мы используем этот временной сдвиг, чтобы вычислить, как далеко находился спутник, когда он послал сигнал. Скажем, каждая галочка в коде соответствует 1 миллисекунде. Если приемнику приходится сдвигать коды на 70 делений, то сигналу требуется 70 миллисекунд, чтобы добраться от спутника до Земли. Чтобы преобразовать это в расстояние, мы умножаем на скорость света (~3×10 8 м/с). Это дает вам примерно 21 000 000 метров.
Мы используем этот временной сдвиг, чтобы вычислить, как далеко находился спутник, когда он послал сигнал. Скажем, каждая галочка в коде соответствует 1 миллисекунде. Если приемнику приходится сдвигать коды на 70 делений, то сигналу требуется 70 миллисекунд, чтобы добраться от спутника до Земли. Чтобы преобразовать это в расстояние, мы умножаем на скорость света (~3×10 8 м/с). Это дает вам примерно 21 000 000 метров.
Рисунок 3. Каждый приемник GPS записывает входящие сигналы от нескольких спутников. Кредит: Кристин Ларсон.
Рисунок 4. Приемник GPS сравнивает входящие сигналы с кодами всех спутников. Кредит: Кристин Ларсон.
Теперь приемник знает, как далеко находился каждый спутник в момент отправки сигнала. Но предстоит еще много работы. Помните, мы говорили, что у каждого спутника свои часы? Это означает, что радиус каждой из этих сфер на рисунке 2 будет немного отличаться, в зависимости от того, быстро или медленно идут эти спутниковые часы. Это нетривиальная проблема, потому что погрешность спутниковых часов может достигать 150 км! (См. этот рисунок для некоторых типичных поправок часов). Эту проблему решает сегмент управления, о котором мы говорили на странице Satellites, Controllers, Users. Станция Master Control синхронизирует все часы спутников и передает их поправки пользователям.
Но предстоит еще много работы. Помните, мы говорили, что у каждого спутника свои часы? Это означает, что радиус каждой из этих сфер на рисунке 2 будет немного отличаться, в зависимости от того, быстро или медленно идут эти спутниковые часы. Это нетривиальная проблема, потому что погрешность спутниковых часов может достигать 150 км! (См. этот рисунок для некоторых типичных поправок часов). Эту проблему решает сегмент управления, о котором мы говорили на странице Satellites, Controllers, Users. Станция Master Control синхронизирует все часы спутников и передает их поправки пользователям.
Наконец, нам нужно знать, где находился спутник, когда отправил сигнал. Спутники GPS движутся со скоростью ~ 4 км/сек, поэтому важно очень хорошо знать местоположение координат. К счастью, главный центр управления может предоставить эту информацию в режиме реального времени с точностью до нескольких метров. Последнее, что нужно сделать приемнику GPS, — это синхронизировать свои часы с созвездием GPS. Для этого используются измерения с четвертого спутника.
Для этого используются измерения с четвертого спутника.
RTL-SDR Учебное пособие: GPS-декодирование и построение графиков
RTL-SDR можно использовать для получения, декодирования и построения данных глобальной системы позиционирования (GPS) в режиме реального времени. Для этого RTL-SDR должен быть подключен к антенне GPS.
Чрезвычайно дешевые активные GPS-антенны стоимостью 5 долларов США или меньше с разъемами SMA можно найти на eBay, Amazon или Aliexpress. Эти GPS-антенны содержат небольшую керамическую накладную антенну, малошумящий усилитель и GPS-фильтр. Чтобы запитать МШУ в антенне, вам понадобится RTL-SDR с тройником смещения. Наши ключи RTL-SDR.com V3 имеют эту встроенную функцию, но если у вас нет V3, вы также можете использовать самодельный тройник внешнего смещения 5 В или взломать его в стандартный RTL-SDR, если хотите.
Также обратите внимание, что большинство стандартных RTL-SDR R820T/2 перестают принимать через несколько минут на частотах выше примерно 1,3 ГГц из-за перегрева. Наши ключи RTL-SDR.com V3 не имеют этой проблемы в большинстве климатических условий благодаря охлаждению металлического корпуса и улучшенному тепловому дизайну на печатной плате. Если вы столкнулись с этой проблемой, ее также можно решить с помощью специальных драйверов L-Band RTL-SDR.
Наши ключи RTL-SDR.com V3 не имеют этой проблемы в большинстве климатических условий благодаря охлаждению металлического корпуса и улучшенному тепловому дизайну на печатной плате. Если вы столкнулись с этой проблемой, ее также можно решить с помощью специальных драйверов L-Band RTL-SDR.
Типичная GPS-антенна стоимостью 3 доллара.
Основная частота GPS составляет 1,575420 ГГц, но большая часть этого сигнала очень слаба и ниже минимального уровня шума. Если вы попытаетесь просмотреть спектр GPS в SDR #, вы обнаружите, что не увидите ничего, кроме, возможно, очень слабого горба. Такой слабый сигнал действительно восстанавливается только благодаря умной обработке сигнала. Ниже мы показываем скриншоты спектра GPS, видимого RTL-SDR и более широкополосным SDR Airspy R2.
В следующем учебном пособии показано, как получать и декодировать сигналы GPS и получать координаты на карте вашего местоположения, используя только ключ RTL-SDR (с тройником смещения) и антенну GPS. Это руководство в значительной степени основано на записи в блоге Филипа Хана по адресу sdgps. blogspot.com/2015/12/first-proof-of-concept-gps-fix-in.html.
blogspot.com/2015/12/first-proof-of-concept-gps-fix-in.html.
- Загрузите GNSS-SDRLIB с github.com/taroz/GNSS-SDRLIB. На GitHub нажмите зеленую кнопку «Клонировать или загрузить» справа, а затем нажмите «Загрузить ZIP». Распакуйте zip-файл в удобную папку на вашем ПК. Если вы хотите использовать модифицированные драйверы L-диапазона, скопируйте модифицированную rtlsdr.dll в папку bin.
- Загрузите последнюю версию RTK-NAVI с сайта rtklib.com. Если хотите, вы также можете попробовать их бета-версию на github.com/tomojitakasu/RTKLIB_bin/tree/rtklib_2.4.3. Распакуйте zip в удобную папку на вашем ПК.
- Убедитесь, что ваш RTL-SDR подключен и тройник смещения активирован (программное обеспечение V3 для активации тройника смещения, см. функцию 2).
- В папке GNSS-SDRLIB откройте файл gnss-sdrgui.exe. Это будет храниться в подпапке bin.
- Теперь установите следующие параметры:
- Изменить тип ввода на RTL-SDR
- Установите флажок рядом с RTCM MSM и установите порт на 9999.

- Убедитесь, что для параметра «Интервал вывода» установлено значение 10 Гц.
- Убедитесь, что отмечены оба флажка «Получение участка» и «Отслеживание участка».
- В разделе «Разное» при желании введите примерную широту и долготу, чтобы получить первоначальную блокировку.
- Под рубриками GPS, ГЛОНАСС и Galileo убедиться, что «ВСЕ»
Примените соответствующие настройки в графическом интерфейсе пользователя GNSS-SDRLIB
- Нажмите Старт. Куча командных окон начнет открываться и закрываться на несколько секунд. После этого откроется куча графических окон gnuplot. Их можно игнорировать.
- Затем перейдите в извлеченную папку RTK-NAVI и войдите в каталог bin. Откройте файл rtlnavi.exe.
- Нажмите кнопку «I» в правом верхнем углу.
- Установите флажок рядом с (1) Ровер и измените «Тип» на «TCP-клиент», а «Формат» — на RTCM3. Нажмите кнопку с тремя точками под крайним левым словом «Выбор» и установите для параметра «Адрес TCP-сервера» значение localhost, а для параметра «Порт» — значение 9.
