Содержание
Управление автомобилем при объездах препятствий, встречных разъездах, обгонах
Управление автомобилем при объездах препятствий, встречных разъездах, обгонах
Перестроение на соседнюю полосу
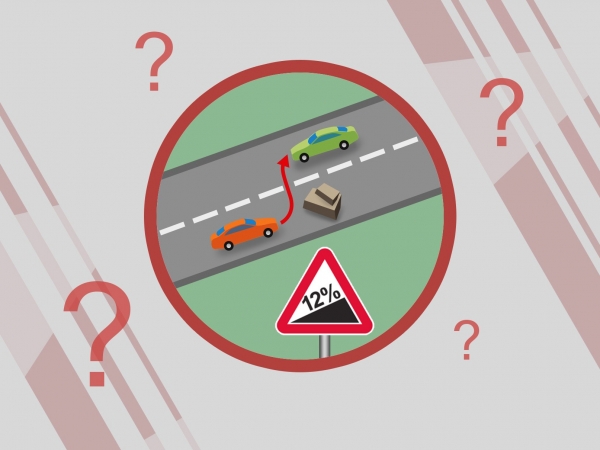
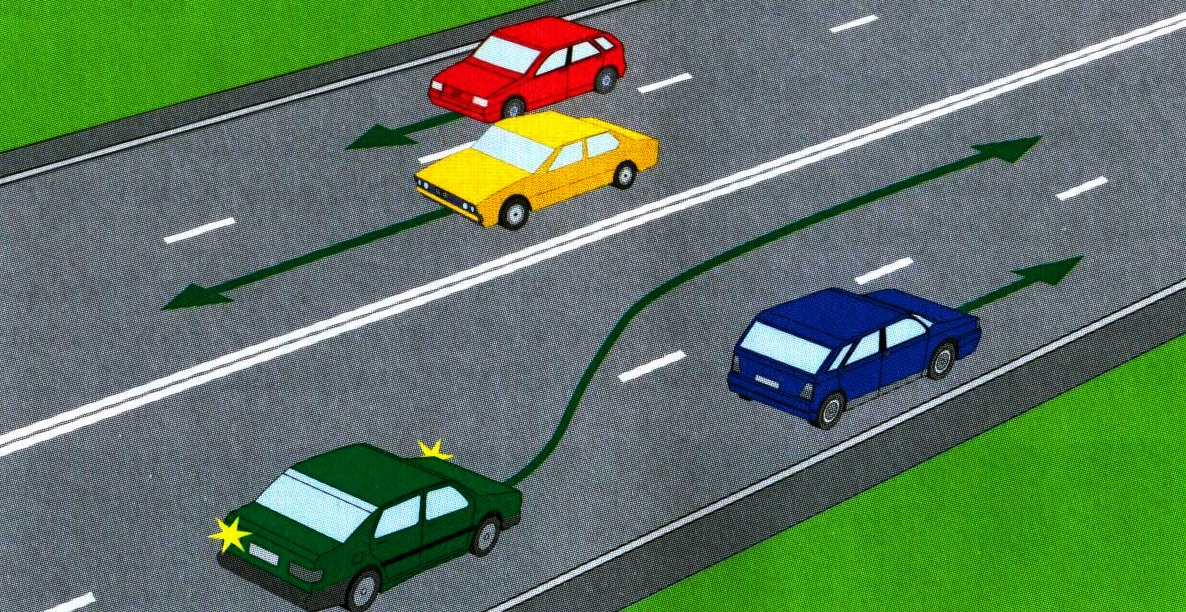
Объезд стоящего на правой полосе движения транспортного средства или другого препятствия представляет для водителя определенную опасность. Связана она с перестроением на левую полосу. Наиболее опасным является выполнение этого маневра с выездом на встречную полосу.
Выполняя перестроение на соседнюю полосу, необходимо уступить дорогу транспортным средствам, движущимся по ней без изменения направления движения, заранее включив световой указатель поворота, перестроиться на соседнюю полосу плавно, без резких поворотов рулевого колеса. Выезжать для объезда препятствия необходимо заранее, обеспечивая себе хорошую видимость. При маневрах, связанных с выездом на полосу встречного движения, следует правильно оценить расстояние до встречного транспортного средства. Если оно недостаточно для выполнения безопасного объезда, необходимо снизить скорость вплоть до остановки, пропуская его. Особенно осторожно необходимо объезжать маршрутное транспортное средство, остановившееся на обозначенной остановке. В этих случаях необходимо снизить скорость и увеличить боковой интервал, так как возможно появление пешеходов на проезжей части.
Особенно осторожно необходимо объезжать маршрутное транспортное средство, остановившееся на обозначенной остановке. В этих случаях необходимо снизить скорость и увеличить боковой интервал, так как возможно появление пешеходов на проезжей части.
Во время занятий, вы сможете пройти это на практике с инструктором по вождению.
При разъезде с встречными транспортными средствами необходимо учитывать ширину проезжей части, состояние дорожного покрытия, скорость движения, динамические размеры автомобиля. Особенно опасными участками дороги при встречных разъездах являются мосты, тоннели, места с резким сужением проезжей части и небольшими радиусами поворотов. Необходимо так же помнить, что при разъезде на высокой скорости с грузовыми автомобилями и автобусами опасность увеличивается из-за сильных встречных воздушных потоков.
Рекомендуемые безопасные дистанции и боковые интервалы на дорогах, имеющих сухое асфальтобетонное покрытие
|
Скорость (км\ч)
|
40
|
60
|
80
|
90
|
110
|
|
Дистанция (м)
|
24 и более
|
43 и более
|
65 и более
|
80 и более
|
110 и более
|
|
Боковой интервал (м)
|
1.
|
1.5 и более
|
1.8 и более
|
2.0 и более
|
2.3 и более
|
 2 и более
2 и болееПрим. В таблице приведены примерные данные с учетом средней скорости реакции водителя
Обгон является одним из сложных и опасных маневров, требующий от водителя правильного расчета его действий. Если на дороге несколько полос движения в одном направлении обгон выполняется без выезда на встречную полосу и менее опасен, чем с выездом на полосу движения встречного направления. Прежде чем приступить к этому маневру водитель должен убедиться, что на данном участке дороги он не запрещен правилами. Не стоит забывать подумать и о его целесообразности в конкретной ситуации.
Безопасность при обгонах обеспечат четкое выполнение правил дорожного движения, правильный расчет траектории движения, прогнозирование развития дорожной ситуации, опыт в управлении автомобилем.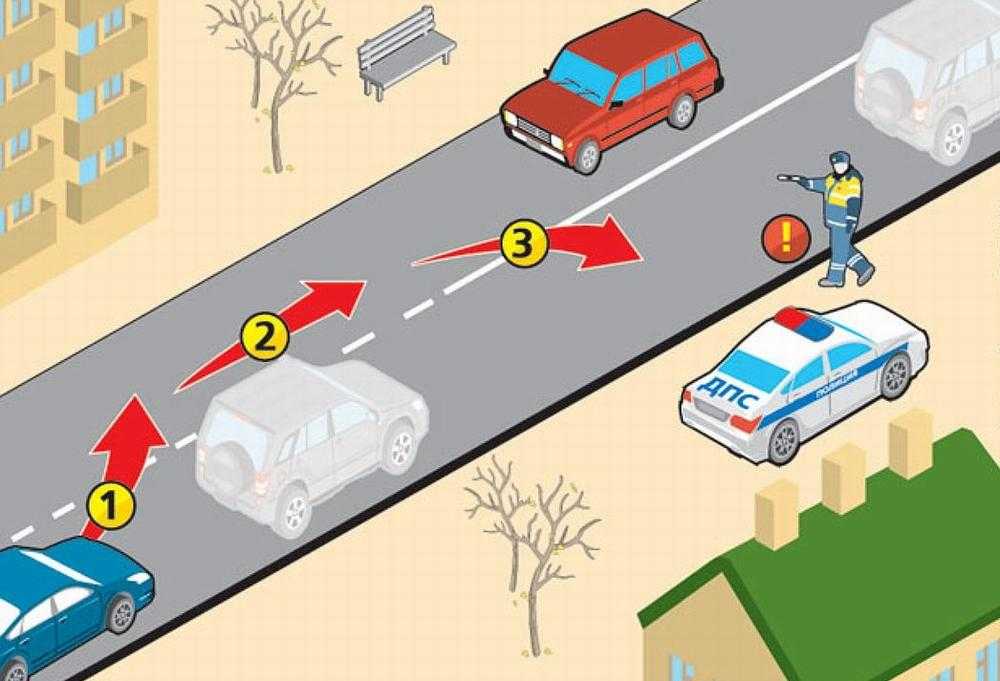
Правила выполнения обгона
- Убедиться, что водитель впереди идущего автомобиля не включил световой указатель поворота
- Убедиться, что водитель находящийся сзади не меняет полосу движения для выполнения обгона
- Убедиться, что полоса движения, по которой будет выполняться обгон — свободная, или на достаточном расстоянии свободна от транспортных средств, движущихся по ней.
- Убедиться в отсутствии транспортных средств, движущихся по встречной полосе, или правильно рассчитать траекторию выполняемого обгона, если они находятся в зоне видимости.
Условия при которых не целесообразно выполнять обгоны
- в плотных транспортных потоках;
- перед остановкой у светофора;
- если после обгона состояние дорожного полотна не позволит двигаться с большей скоростью;
В этих случаях водитель, выполняющий этот маневр, создает опасную дорожную ситуацию как для себя, так и для других участников движения.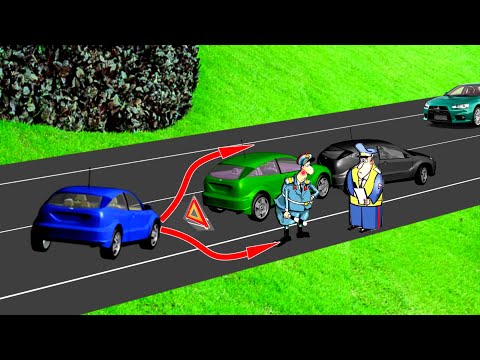 При выполнении обгона водитель должен хорошо просматривать весь участок дороги, где будет выполнен этот маневр. По этому, в целях обеспечения безопасности движения, обгон запрещен правилами на участках дороги с ограниченной видимостью. В качестве дополнительной информации о его запрете на проезжей части наносят сплошные линии белого цвета, которые запрещается пересекать во всех случаях.
При выполнении обгона водитель должен хорошо просматривать весь участок дороги, где будет выполнен этот маневр. По этому, в целях обеспечения безопасности движения, обгон запрещен правилами на участках дороги с ограниченной видимостью. В качестве дополнительной информации о его запрете на проезжей части наносят сплошные линии белого цвета, которые запрещается пересекать во всех случаях.
Обгон крупногабаритного транспортного средства
Обзор дорожной ситуации будет не полным, если двигаться за крупногабаритным транспортным средством. Обгон таких автомобилей требует от водителей определенного опыта и навыков. Начинать его необходимо с плавного смещения своего автомобиля к левой полосе, где лучше просматривается дорожная ситуация. Величина пройденного пути при обгонах зависит от скорости движения транспортных средств и ее разницы между обгоняющим и обгоняемым автомобилями.
|
Скорость обгоняемого автомобиля (км\ч)
|
Скорость обгоняющего автомобиля (км\ч)
|
Длина пройденного пути при обгоне (м)
|
Время обгона (сек)
|
|
Населенный пункт
| |||
|
40
|
50
|
250
|
18
|
|
40
|
55
|
206
|
13.
|
|
40
|
60
|
150
|
9
|
|
Вне населенного пункта
| |||
|
70
|
80
|
800
|
36
|
|
70
|
85
|
637
|
27
|
|
70
|
90
|
450
|
18
|
|
На автомагистрали
| |||
|
90
|
100
|
1611
|
58
|
|
90
|
105
|
1268
|
43.
|
|
90
|
110
|
886
|
29
|
 5
5 5
5Прим. В таблице представлены примерная длина пути и время при безопасных обгонах, с учетом правильно выбранных дистанциях и боковых интервалах на дорогах с обычным, сухим покрытием.
Обгон с выездом на полосу встречного движения
При выполнении обгона с выездом на полосу встречного движения необходимо правильно рассчитать траекторию движения своего транспортного средства с учетом движения встречных автомобилей Сближение с ними происходит со скоростью, равной сумме скоростей обоих транспортных средств. Поэтому при таких обгонах необходимый путь до встречных автомобилей должен быть в 2-3 раза больше. Для выполнения безопасного обгона следует учитывать ширину проезжей части и состояние дорожного полотна, выдерживая боковые интервалы в пределах 1-1,5 метров. Опасно выполнять маневр, если поверхность дороги имеет выбоины, неровности, волнистости при которых нарушается устойчивость автомобиля. Грубой ошибкой является выполнение обгона сразу за впереди движущимся автомобилем, выполняющим обгон. При этом водитель не видит реальной ситуации, развивающейся впереди из-за ограниченного обзора.
Грубой ошибкой является выполнение обгона сразу за впереди движущимся автомобилем, выполняющим обгон. При этом водитель не видит реальной ситуации, развивающейся впереди из-за ограниченного обзора.
Двойной обгон или обгон с перестроением на правую полосу
Очень опасен «двойной обгон». При его выполнении водитель нарушает правила дорожного движения. Опасность этого маневра заключается в ограниченной видимости полосы движения встречного направления и минимальных боковых интервалов при разъездах.
Распространенной ошибкой является перестроение на правую полосу движения с целью опережения по ней впереди идущего транспортного средства, когда левые полосы движения заняты для обгона. Водитель, сидящий с левой стороны в своем автомобиле, своевременно может не заметить стоящее на правой полосе препятствие и произвести на него наезд.
Во всех случаях при выполнении обгона необходимо оставлять небольшой запас мощности двигателя, который в случаи необходимости позволит увеличить скорость. Обгон на грунтовых и заснеженных дорогах начинают с включения пониженной передачи, избегая пробуксовки колес и заносов транспортного средства. Рулевое колесо при этом вращают плавно двумя руками. На влажной дороге, покрытой грязью или мокрым снегом, при выполнении обгона заранее необходимо включить стеклоочистители ветрового стекла, воспользовавшись при необходимости и стеклоомывателями. При выполнении обгона в ночное время следует предупредить водителя обгоняемого автомобиля переключением света фар. Старайтесь завершить обгон как можно быстрее, не задерживайтесь в зоне невидимости водителя обгоняемого автомобиля. Если в процессе обгона у вас возникли сомнения относительно возможности безопасного завершения маневра, возвратитесь обратно на прежнюю полосу движения. Завершение обгона следует начинать не раньше того, как в зеркало заднего вида вы сможете увидеть обе фары обгоняемого автомобиля. После этого включите указатель правого поворота, чтобы предупредить водителя о перестроении на его полосу.
Обгон на грунтовых и заснеженных дорогах начинают с включения пониженной передачи, избегая пробуксовки колес и заносов транспортного средства. Рулевое колесо при этом вращают плавно двумя руками. На влажной дороге, покрытой грязью или мокрым снегом, при выполнении обгона заранее необходимо включить стеклоочистители ветрового стекла, воспользовавшись при необходимости и стеклоомывателями. При выполнении обгона в ночное время следует предупредить водителя обгоняемого автомобиля переключением света фар. Старайтесь завершить обгон как можно быстрее, не задерживайтесь в зоне невидимости водителя обгоняемого автомобиля. Если в процессе обгона у вас возникли сомнения относительно возможности безопасного завершения маневра, возвратитесь обратно на прежнюю полосу движения. Завершение обгона следует начинать не раньше того, как в зеркало заднего вида вы сможете увидеть обе фары обгоняемого автомобиля. После этого включите указатель правого поворота, чтобы предупредить водителя о перестроении на его полосу.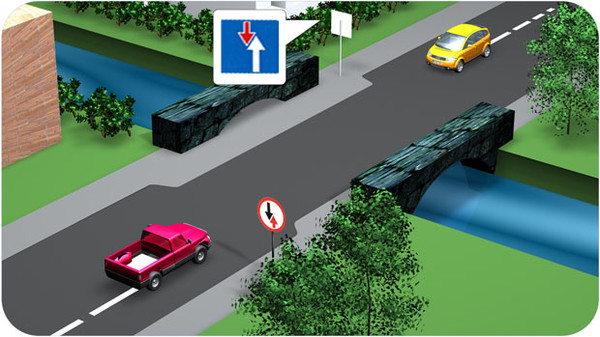
Полезная информация:
- Правила проезда перекрестка с круговым движением
- Автоинструкторы, обучение вождению АКПП, МКПП
Поделиться ссылкой:
Глава 12. Обгон, встречный разъезд
- 92.
До начала обгона водитель должен убедиться в том, что полоса движения, на которую он намерен выехать, свободна и своими действиями он не создаст угрозу безопасности дорожного движения, не заставит участников дорожного движения изменить направление и (или) снизить скорость движения. - 93.
Водителю запрещается выполнять обгон: - 93.1.
если водитель транспортного средства, движущегося впереди по той же полосе движения, подал сигнал левого поворота; - 93.2.
если следующие за ним водители начали обгон. - 94.
Объезд транспортного средства, водитель которого подал сигнал поворота налево и приступил к выполнению маневра, производится с правой стороны.
- 95.
Водитель обгоняемого транспортного средства обязан с учетом дорожно-транспортной обстановки двигаться ближе к правому краю проезжей части дороги и не препятствовать обгону увеличением скорости движения или иными действиями. - 96.
Обгон запрещается: - 96.1.
в зоне действия дорожных знаков «Обгон запрещен», «Обгон грузовым автомобилям запрещен», на поворотах дороги, обозначенных дорожными знаками «Опасный поворот», «Опасные повороты», на подъемах, обозначенных дорожным знаком «Крутой подъем», а также при наличии дорожной разметки 1.1 (за исключением обгона одиночного транспортного средства, движущегося со скоростью менее 30 км/ч), в конце подъемов и на других участках дорог с ограниченной обзорностью дороги; - 96.2.
на обозначенных и (или) регулируемых перекрестках; - 96.3.
на пешеходных переходах и ближе 50 метров от них в обе стороны; - 96. 4.
транспортного средства, производящего обгон или объезд препятствия; - 96.5.
при недостаточной видимости дороги; - 96.6.
на путепроводах и под ними; - 96.7.
на железнодорожных переездах и ближе чем за 100 метров перед ними. - 97.
Вне населенных пунктов водитель тихоходного, тяжеловесного и (или) крупногабаритного транспортного средства, а также транспортного средства, конструкция которого, перевозимый груз или техническое состояние затрудняют его обгон, должен занять положение на дороге как можно правее, а при необходимости и остановиться, чтобы пропустить скопившиеся за ним транспортные средства. - 98.
Если встречный разъезд транспортных средств затруднен, то водитель, на стороне которого имеется препятствие для дорожного движения, обязан уступить дорогу. - 99.
На уклонах, обозначенных дорожными знаками «Крутой спуск», «Крутой подъем», при наличии препятствия для дорожного движения уступить дорогу обязан водитель транспортного средства, движущегося на спуск.
- 92.
уклонение от препятствий | Green Car Journal
В наши дни много говорят о беспилотных автомобилях и их месте в нашем будущем. Хотя мы, вероятно, увидим автономные транспортные средства, курсирующие по нашим дорогам в ближайшие годы, тем временем многие передовые технологии, неотъемлемые от беспилотных автомобилей, доступны в автомобилях, которые вы можете купить сегодня, что делает их умнее и безопаснее. Сосредоточив внимание на предотвращении несчастных случаев и удобстве для водителя, они обычно сначала появляются в автомобилях более высокого класса, прежде чем они отфильтруются до более доступных моделей, что обусловлено популярностью, значительным снижением затрат и правительственными постановлениями. К счастью, многие новые возможности можно легко добавить, написав программное обеспечение, использующее датчики, камеры и другое оборудование, уже установленное на транспортном средстве. Автопроизводители могут использовать Интернет вещей (IoT) для добавления этого программного обеспечения по беспроводной сети, не требуя, чтобы владельцы возвращали автомобили дилеру, точно так же, как Windows и Apple обновляют ваш компьютер и смартфон. Да, это дивный новый мир.
ОБНАРУЖЕНИЕ СОННОСТИ ВОДИТЕЛЯ помогает предотвратить несчастные случаи. Усталость можно измерить, отслеживая активность глаз, изменения стиля вождения, определяемые рулевым управлением, или систему оповещения о выходе из полосы движения, показывающую, что водитель часто смещается с полосы движения. В более сложных системах сонливость можно определить с помощью датчиков, отслеживающих активность мозга, частоту сердечных сокращений, проводимость кожи или мышечную активность. Может быть выдано визуальное или звуковое предупреждение или водительское сиденье может вибрировать. Более сложные методы мониторинга могут также обнаруживать неотложную медицинскую помощь и звонить по номеру 9.11.
Системы оповещения о слепых зонах обычно используют радарные или ультразвуковые датчики с обеих сторон автомобиля, чтобы «выискивать» автомобили, грузовики и мотоциклы в боковых слепых зонах. Эти системы предупреждают водителя мигающим светом в зеркалах бокового вида и часто слышимым звуком или вибрацией рулевого колеса. Если сигнал поворота не активирован, указывая на то, что вы планируете сменить полосу движения, сигнальная лампа зеркала загорается, показывая, что в вашей слепой зоне есть автомобиль, но не мигает.
АДАПТИВНЫЙ КРУИЗ-КОНТРОЛЬ дополняет стандартную систему круиз-контроля автомобиля для повышения безопасности. После выбора она автоматически регулирует скорость автомобиля, чтобы поддерживать безопасную дистанцию до впереди идущего автомобиля. Радар, лазерные датчики и/или камеры системы обнаруживают, собираетесь ли вы обгонять транспортное средство на полосе впереди, и при необходимости автоматически снижают вашу скорость. Установленная вами скорость круиз-контроля возобновляется, когда позволяет движение впереди.
СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ могут предотвратить или уменьшить тяжесть столкновения с помощью камер, радаров и иногда лидаров для обнаружения неминуемой аварии. После обнаружения система выдает предупреждение, если столкновение неизбежно, и может автономно активировать торможение или рулевое управление, или и то, и другое. Если водитель не реагирует на предупреждение, система предварительно заряжает тормоза и повышает чувствительность тормозного усилителя, чтобы максимизировать эффективность торможения. Большинство производителей планируют включить автоматическое экстренное торможение в стандартную комплектацию автомобилей в США к 2022 году9.0003
LANE DEPARTURE ALERT использует специальную камеру для обнаружения нарисованной разметки полосы движения и предупреждения водителя, который непреднамеренно отклоняется от полосы движения. Звуковое предупреждение и световой индикатор на приборной панели обычно используются для предупреждения своенравных водителей, а иногда и вибрация рулевого колеса. В более сложных системах Steering Assist инициирует корректирующее рулевое управление, чтобы помочь удержать автомобиль на своей полосе, если водитель не предпринимает корректирующих действий.
СИСТЕМЫ ОБХОДА ПРЕПЯТСТВИЙ сканируют дорогу впереди с помощью радара, ультразвуковых датчиков и/или камер для обнаружения пешеходов, мотоциклов, крупных животных или других объектов, которые останавливаются или движутся медленно. Первоначально визуальные и звуковые предупреждения даются, когда датчики обнаруживают потенциальное столкновение. При необходимости автоматическое рулевое управление и торможение маневрируют автомобилем, чтобы избежать столкновения.
ПРЕДСКАЗАТЬ ДОРОГУ ВПЕРЕДИ можно с помощью навигационных данных GPS, интегрированных с бортовыми системами. Например, навигационные данные можно использовать для управления коробкой передач или настройки подвески для извилистой дороги впереди или для настройки на спортивный стиль вождения, экономию топлива или комфорт. В подключаемых транспортных средствах данные могут использоваться для определения участков маршрута, наиболее подходящих для электропривода или для зарядки аккумулятора.
ИНФОРМАЦИЯ О ДВИЖЕНИИ В РЕАЛЬНОМ ВРЕМЕНИ, предоставляемая службой информации о дорожном движении, идентифицирует аварии и другие задержки на дорогах, представляя эту информацию на навигационном экране. Навигационная система может рассчитать и порекомендовать альтернативные маршруты к пункту назначения в обход места, вызывающего задержку.
PARKING ASSIST позволяет автоматическую параллельную, а часто и перпендикулярную парковку без помощи рук, управляя дроссельной заслонкой, рулевым управлением и торможением. Система сканирует, чтобы убедиться, что места достаточно, и часто находит свободные парковочные места. Усовершенствованные системы могут работать с системой информации о дорожном движении в реальном времени, чтобы прогнозировать шансы найти свободное место для парковки в определенном районе, поскольку поиск места для парковки является основной причиной заторов на дорогах в городских районах.
PRE-SENSE SYSTEMS обнаруживают потенциально неизбежные аварии с помощью датчиков электронных систем стабилизации и предотвращения столкновений, обнаружения слепых зон, адаптивного круиз-контроля и камер заднего вида. Предвоспринимающее событие происходит поэтапно с визуальным и/или звуковым предупреждением, чтобы водитель мог предпринять действия по уклонению, затем краткое автоматическое торможение сообщает водителю о необходимости торможения с усилителем торможения, усиливающим замедление. Если предотвратить столкновение невозможно, применяется максимальное торможение, ремни безопасности предварительно натягиваются, включаются аварийные огни, закрываются окна и раскрываются подушки безопасности для смягчения травм.
REMOTE PARK ASSIST позволяет вашему автомобилю самостоятельно припарковаться в узком месте или в узком гараже. С помощью этой системы водитель и пассажиры выходят из автомобиля, как только он оказывается на одном месте с парковкой. Затем автомобиль медленно и автономно движется вперед с помощью брелока дистанционного управления или смартфона. Эта возможность стала возможной благодаря датчикам объемного обзора, которые обеспечивают точное движение и позиционирование автомобиля среди других автомобилей или объектов, используя те же датчики и элементы управления, что и более привычные параллельные и перпендикулярные системы помощи при парковке. После парковки автомобиль также можно выключить и заблокировать дистанционно. Процесс обратный, чтобы забрать машину, когда вы хотите уйти.
СВЯЗЬ АВТОМОБИЛЕЙ С АВТОМОБИЛЕМ позволяет транспортным средствам «разговаривать» друг с другом для обмена информацией, например, о скорости и местоположении, полученном с помощью GPS. Основным преимуществом является предотвращение несчастных случаев, но после внедрения эта сложная сеть также может уменьшить заторы на дорогах. Транспортные средства обмениваются данными о безопасности 10 раз в секунду, чтобы выявлять риски и предупреждать, чтобы избежать аварий. Такого рода информация может заранее информировать водителя о том, безопасно ли объехать двухполосную дорогу, повернуть налево поперек пути встречного движения или приближается ли транспортное средство на слепом перекрестке. Связь между транспортным средством и инфраструктурой позволяет передавать данные между транспортными средствами и элементами дорожной инфраструктуры, включая ограничения скорости и светофоры. Благодаря передовым системам V2V и V2I транспортные средства могут автономно предпринимать необходимые действия, чтобы избежать потенциально серьезного инцидента или столкновения.
Уклонение от препятствий в роботах AMR и AGV Объяснение
Одной из наиболее отличительных особенностей AMR является их точно настроенная способность избегать препятствий. Как обсуждалось в этой статье о локализации, роботы AGV перемещаются, используя функции, установленные на объекте. Они следуют разными путями и не могут изменить маршрут, в большинстве случаев требуя вмешательства человека при введении неизвестных элементов. В AMR используется более продвинутая техника обхода препятствий, обеспечивающая повышенную эффективность и большую отдачу от инвестиций.
Предотвращение столкновений AMR и предотвращение столкновений с помощью AGV
И AMR, и AGV включены с предотвращением столкновений . Как минимум, их система безопасности обнаружит любую блокировку и безопасно замедлит или остановит робота до того, как произойдет столкновение. Однако обычно это предел возможностей AGV. С другой стороны, AMR имеют уклонений от препятствий . Робот не только способен избегать столкновений, но и может изменить маршрут и продолжить выполнение своей задачи, как это сделал бы человек.
В динамичной складской среде крайне важно избегать препятствий. Имея только базовое предотвращение столкновений, AGV необходимо контролировать чаще. Любое препятствие — скажем, выброшенная упаковка или другое транспортное средство — должно быть перемещено человеком. Эти частые перерывы отнимают рабочее время, часто истощая трудовые ресурсы, которые лучше использовать в другом месте. Такой уровень взаимодействия подрывает большую часть цели интеграции складских роботов.
AMR обладают возможностями, намного более близкими к настоящей автономности. Они могут самостоятельно устранять проблемы и более последовательно добавлять ценность, не прерывая другие рабочие процессы.
Роботы AMR и AGV в пробках
Так же, как все мобильные роботы способны обнаруживать препятствия и избегать столкновений, все мобильные роботы также имеют так называемые поля безопасности или зоны ограничения скорости. В этих областях роботы запрограммированы на замедление или остановку, и им требуется определенное время буферизации, прежде чем продолжить свою задачу. Поставщики AGV программируют эти местоположения в роботах в процессе картирования.
Однако важно еще раз упомянуть, что склады являются динамическими средами. Зона, которая не использовалась при установке AGV, может стать самым загруженным узлом на объекте, а та, которая изначально была зоной с интенсивным движением, останется неиспользованной. Это может быть решено одним из двух способов:
- Во-первых, AGV может обнаруживать трафик и замедляться в новой занятой области, а также продолжать замедлять движение, как запрограммировано в исходной, но теперь пустой области без необходимости. Это тормозит эффективность транспортных средств.
- Во-вторых, AGV может быть запрограммирован на игнорирование движения в ранее пустой, а теперь интенсивной зоне движения и ускорение через нее. Это серьезная проблема безопасности.
планирование пути возможности AMR предлагают решение этой проблемы, регулируя не только скорость, но и направление. Роботы, использующие эту технологию, используют интеллектуальную аналитику для выбора наиболее эффективного маршрута для выполнения своей задачи с учетом трафика и препятствий в режиме реального времени. В то время как AGV ограничены ожиданием, пока их путь не будет свободен, AMR могут ненадолго отклониться от пути, чтобы объехать трафик на безопасном расстоянии, предоставляя достаточно места другим участникам для выполнения задач. Если это не самый эффективный выбор, AMR полностью выберет новый маршрут.
Динамическое уклонение от препятствий: проезжающие мимо движущиеся транспортные средства
AGV — или даже некоторые AMR — используют ограниченное уклонение от препятствий, отклоняясь от своего пути только на короткое расстояние, чтобы избежать статических препятствий. Хотя это работает в отдельных случаях, этого недостаточно в перегруженных районах. Движущиеся транспортные средства часто встречаются в промышленных помещениях, и AMR гораздо лучше приспособлены для успешного взаимодействия с ними.
AMR знают правила дорожного движения. Они предназначены для совместного использования пространства с транспортными средствами с ручным управлением, другими AMR и AGV и беспрепятственно перемещаются с другими объектами и объектами в своем общем пространстве. В ситуации, когда AMR встречает встречный транспорт, он может отойти в сторону, чтобы пройти, подождать, пока берег не освободится, а затем возобновить свою миссию. В этом же случае AGV остановится, потому что воспримет движущийся объект как непреодолимую проблему. Затем он может полностью заблокировать трафик и потребовать вмешательства оператора.
Преимущества AMR по сравнению с роботами AGV
В большинстве динамичных складских сред товары перемещаются быстро, а рабочий процесс или планы этажей часто меняются. Путь, следующий за AGV, не может обрабатывать эти изменения. Менеджер участка должен вручную изменить маршрут робота AGV, чтобы научить его новому маршруту. Эти вмешательства носят прерывающий характер и потребляют рабочее время. AMR избегают препятствий, обеспечивая непревзойденную автономию. Они гораздо лучше приспособлены для работы без посторонней помощи, что дает руководителям цехов душевное спокойствие и оптимизированные автономные рабочие процессы.
Автономные мобильные роботы, такие как самоходные тягачи, вилочные погрузчики и тележки с поддонами, применяют технологию обхода препятствий таким образом, чтобы максимально повысить безопасность и эффективность.
Чтобы узнать больше о различиях между AMR и AGV, загрузите информационный документ.
Опубликовано
Теги НАВИГАЦИЯ, РОБОТОТЕХНИКА НАВИГАЦИЯ
Захари Дайдек
Технический директор
В Vecna Robotics я работаю с каждым подразделением для принятия решений в отношении нашей компании и создания общего продукта компании.