Содержание
GPS: определение, принцип работы, виды устройств с GPS
Глобальная система позиционирования – Global Positioning System – появилась в 50-е благодаря запуску спутника. Когда первый советский спутник вышел на орбиту, американцы обратили внимание: при отдалении он равномерно меняет частоту сигнала. Ученые проанализировали данные и поняли, что спутниковый сигнал позволяет точно определить координаты объектов на земле, а также скорость их передвижения. Первыми систему GPS взяли на вооружение военные: Министерство обороны запустило спутниковую навигацию в своих целях, но уже через несколько лет она стала доступна гражданским.
Сейчас на околоземной орбите находятся 24 спутника, которые передают сигналы привязки. Число спутников периодически меняется, но всегда остается достаточным, чтобы поддерживать бесперебойную работу Global Positioning System. На случай форс-мажора предусмотрены запасные спутники, и каждое десятилетие на орбиту выходят новые, модернизированные космические аппараты, потому что ничто не должно нарушить режим работы GPS.
Спутники вращаются по шести орбитам, образуя взаимосвязанную сеть. Ею управляют специальные станции GPS, которые расположены в тропиках, но связаны с координационным центром в Соединенных Штатах. Благодаря этой сети вы можете узнать точные координаты человека, машины или самолета со скоростью прохождения сигнала от спутников, то есть практически мгновенно, а точность показаний не зависит от погодных условий и времени суток. При этом само по себе использование Global Positioning System – бесплатное, и единственное, что нужно, чтобы пользоваться этой навигационной системой, – навигатор или другое устройство, поддерживающее функцию джипиэс.
Принцип работы GPS
В основе технологии – простой навигационный принцип маркерных объектов, который использовался задолго до появления GPS. Маркерный объект – это ориентир, координаты которого точно известны. Для определения координат объекта нужно знать также расстояние от него до маркерного объекта, тогда можно провести на карте линии в сторону маркеров от возможного местоположения: точка пересечения этих линий и будет координатами.
Спутники на околоземной орбите играют в GPS роль маркерных объектов. Они быстро вращаются, но их местоположение постоянно отслеживается, а в каждом навигаторе есть приемник, настроенный на нужную частоту. Спутники посылают сигналы, в которых закодирован большой объем информации, включая точное время. Данные точного времени – одни из самых важных для определения географических координат: ориентируясь на разницу между отдачей и приемом радиосигнала, спутники вычисляют расстояние между собой и навигатором.
Как работает GPS в смартфонах
Навигаторы – один из самых востребованных товаров на рынке гаджетов, по популярности их обгоняют только смартфоны. Но и в смартфоны производители встраивают чипы GPS, чтобы устройство могло выполнять функции навигатора. Однако здесь пользователя может подстерегать ловушка, потому что в погоне за прибылью производители допускают умышленные или случайные неточности в описании своего товара, позволяя покупателям перепутать технологии GPS и AGPS.
Джипиэс – бесплатная навигационная система высокой точности. Подписки на нее нет и быть не может, потому что американцы позволяют пользоваться своими спутниками для навигации безвозмездно. Владельцы смартфонов если и оплачивают, то только приложения или карты. У приемников GPS есть небольшие минусы: они работают только на улице, а из-за плохой погоды могут возникнуть проблемы с приемом сигнала от спутника, но эти недостатки решили с помощью технологии A-GPS (не путать с AGPS). Суть в том, что сигнал от приемника перенаправляют на сервер, на котором содержится вся информация о положении спутников, поэтому трудностей с приемом сигнала не существует. A-GPS используют все современные автомобильные навигаторы.
Но существует также сотовая навигация AGPS – она работает только в зоне покрытия сотовой сети и определяет местоположение с точностью до 500 м. Она менее точная в сравнении с GPS, дает общее представление о месте, где вы находитесь, зато предлагает спутниковую карту окрестностей. Важно, чтобы была подключена услуга мобильного интернета, а на счету оставались деньги. С сервисом AGPS работают Google Maps. Зачастую возможностей сотовой навигации достаточно, но ее все равно не стоит путать с точной и бесплатной системой GPS.
Важно, чтобы была подключена услуга мобильного интернета, а на счету оставались деньги. С сервисом AGPS работают Google Maps. Зачастую возможностей сотовой навигации достаточно, но ее все равно не стоит путать с точной и бесплатной системой GPS.
Виды GPS-устройств
Самое простое навигационное устройство – внешний приемник. Он обращается к спутникам и принимает от них сигнал, но чтобы вы могли воспользоваться информацией, приемник нужно подключить к другому устройству – например, смартфону или ноутбуку, благо, он совместим со всеми востребованными гаджетами и программами. В крайнем случае вам потребуется карта. Приемники GPS используют пешеходные туристы: устройство недорогое, а для расшифровки информации, которую оно принимает, можно пользоваться даже обычной туристической картой местности. Нужно лишь, чтобы на нее была наложена навигационная сетка.
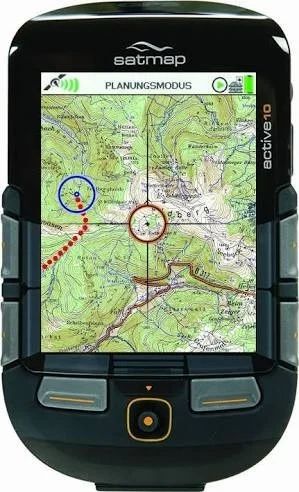
Но самое востребованное сегодня GPS-устройство – это автомобильный навигатор. Он намного сложнее и функциональнее приемника: навигатор больше похож на уменьшенную версию компьютера.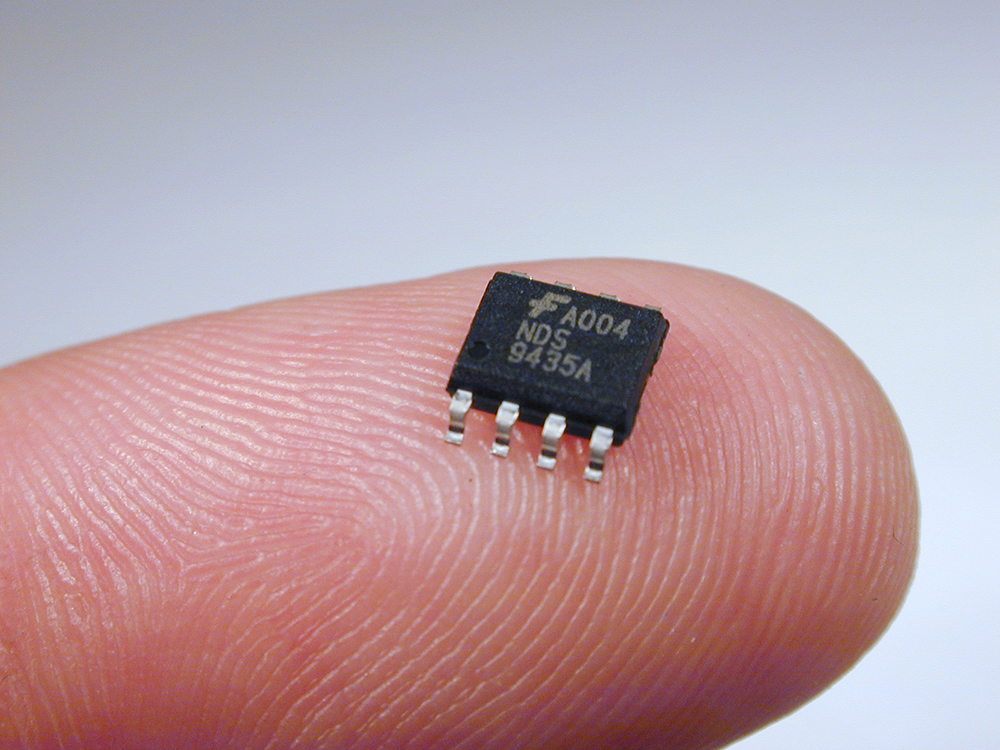 Весь необходимый софт уже установлен производителем, операционная система закрытая. К навигации прибавляют много дополнительных функций, включая выход в интернет.
Весь необходимый софт уже установлен производителем, операционная система закрытая. К навигации прибавляют много дополнительных функций, включая выход в интернет.
Отдельный класс устройств – смартфоны со встроенными приемниками GPS. Не путайте их с моделями, использующими сотовую навигацию! Система работает на смартфонах не так гладко, как на самостоятельных устройствах. Не все модели позволяют поставить полноценный навигационный софт, а если пользоваться онлайн-решениями, то функция станет недоступна при отключении интернета, и тогда исчезнет одно из преимуществ технологии: постоянный доступ. Однако смартфоны со спутниковой навигацией подходят для пешеходов – ориентироваться удобно и данные точные, поэтому вы не заблудитесь даже в непроходимой чаще.
GPS | это… Что такое GPS?
Спутник системы GPS на орбите
GPS (англ. Global Positioning System — система глобального позиционирования, читается Джи Пи Эс) — спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположениe. Позволяет в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.
Позволяет в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.
Основной принцип использования системы — определение местоположения путём измерения моментов времени приема синхронизированного сигнала от навигационных спутников до потребителя. Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приёма антенной GPS-приёмника. То есть, для определения трёхмерных координат GPS-приёмнику нужно иметь четыре уравнения: «расстояние равно произведению скорости света на разность моментов приема сигнала потребителя и момента его синхронного излучения от спутников»:
. Здесь: — местоположение -го спутника, — момент времени приема сигнала от -го спутника по часам потребителя, — неизвестный момент времени синхронного излучения сигнала всеми спутниками по часам потребителя, — скорость света, — неизвестное трехмерное положение потребителя.
Содержание
|
История
Идея создания спутниковой навигации родилась ещё в 50-е годы. В тот момент, когда СССР был запущен первый искусственный спутник Земли, американские учёные во главе с Ричардом Кершнером наблюдали сигнал, исходящий от советского спутника и обнаружили, что благодаря эффекту Доплера частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. Суть открытия заключалась в том, что если точно знать свои координаты на Земле, то становится возможным измерить положение и скорость спутника, и наоборот, точно зная положение спутника, можно определить собственную скорость и координаты.![]()
Реализована эта идея была через 20 лет. В 1973 году была инициирована программа DNSS, позже переименованная в Navstar-GPS, а, затем, в GPS. Первый тестовый спутник выведен на орбиту 14 июля 1974 г., а последний из всех 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., таким образом, GPS встала на вооружение. Стало возможным использовать GPS для точного наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле.
Первоначально GPS — глобальная система позиционирования, разрабатывалась как чисто военный проект. Но после того, как в 1983 году вторгшийся в воздушное пространство Советского Союза самолёт Корейских Авиалиний с 269 пассажирами на борту был сбит из-за дезориентации экипажа в пространстве, президент США Рональд Рейган с целью не допустить в будущем подобные трагедии разрешил частичное использование системы навигации для гражданских целей.[1] Во избежание применения системы для военных нужд точность была уменьшена специальным алгоритмом. [уточнить]
[уточнить]
Затем появилась информация о том, что некоторые компании расшифровали алгоритм уменьшения точности на частоте L1 и с успехом компенсируют эту составляющую ошибки. В 2000 г. это загрубление точности отменил своим указом президент США Билл Клинтон.[2]
| Блок | Период запусков | Запуски спутников | Работают сейчас | |||
|---|---|---|---|---|---|---|
| Запу- щено | Не успешно | Гото- вится | Заплани- ровано | |||
| I | 1978-1985 | 10 | 1 | 0 | 0 | 0 |
| II | 1989-1990 | 9 | 0 | 0 | 0 | 0 |
| IIA | 1990-1997 | 19 | 0 | 0 | 0 | 11 |
| IIR | 1997-2004 | 12 | 1 | 0 | 0 | 12 |
| IIR-M | 2005-2009 | 8 | 0 | 0 | 0 | 7 |
| IIF | 2010-2011 | 2 | 0 | 10 | 0 | 2 |
| IIIA | 2014-? | 0 | 0 | 0 | 12 | 0 |
| Всего | 59 | 2 | 10 | 12 | 31 | |
| (Последнее обновление данных: 9 Окт 2011) Подробнее см. | ||||||
 en:list of GPS satellite launches
en:list of GPS satellite launchesТехническая реализация
Космические спутники
Незапущенный спутник, экспонирующийся в музее. Вид со стороны антенн.
Орбиты спутников
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat- число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
Спутниковая группировка системы NAVSTAR обращается вокруг Земли по круговым орбитам с одной высотой и периодом обращения для всех спутников. Круговая орбита с высотой порядка 20200 км является орбитой суточной кратности с периодом обращения 11 часов 58 минут; таким образом, спутник совершает два витка вокруг Земли за одни звёздные сутки (23 часа 56 минут). Наклонение орбиты (55°) является также общим для всех спутников системы. Единственным отличием орбит спутников является долгота восходящего узла, или точка, в которой плоскость орбиты спутника пересекает экватор: данные точки отстоят друг от друга приблизительно на 60 градусов. Таким образом, несмотря на одинаковые (кроме долготы восходящего узла) параметры орбит, спутники обращаются вокруг Земли в шести различных плоскостях, по 4 аппарата в каждой.
Таким образом, несмотря на одинаковые (кроме долготы восходящего узла) параметры орбит, спутники обращаются вокруг Земли в шести различных плоскостях, по 4 аппарата в каждой.
Радиочастотные характеристики
Спутники излучают открытые для использования сигналы в диапазонах: L1=1575,42 МГц и L2=1227,60 МГц (начиная с Блока IIR-M), а модели IIF будут излучать также на L5=1176,45 МГц . Навигационная информация может быть принята антенной (обычно в условиях прямой видимости спутников) и обработана при помощи GPS-приёмника.
Сигнал с кодом стандартной точности (C/A код — модуляция BPSK(1)), передаваемый в диапазоне L1 (и сигнал L2C (модуляция BPSK) в диапазоне L2 начиная с аппаратов IIR-M), распространяется без ограничений на использование. Первоначально используемое на L1 искусственное загрубление сигнала (режим селективного доступа — SA) с мая 2000 года отключён. С 2007 года США окончательно отказались от методики искусственного загрубления. Планируется с запуском аппаратов Блок III введение нового сигнала L1C (модуляция BOC(1,1)) в диапазоне L1. Он будет иметь обратную совместимость, улучшенную возможность прослеживания пути и в большей степени совместим с сигналами Galileo L1.
Он будет иметь обратную совместимость, улучшенную возможность прослеживания пути и в большей степени совместим с сигналами Galileo L1.
Для военных пользователей дополнительно доступны сигналы в диапазонах L1/L2, модулированные помехоустойчивым криптоустойчивым P(Y) кодом (модуляция BPSK(10)). Начиная с аппаратов IIR-M введён в эксплуатацию новый М-код (используется модуляция BOC(15,10)). Использование М-кода позволяет обеспечить функционирование системы в рамках концепции Navwar (навигационная война). М-код передается на существующих частотах L1 и L2. Данный сигнал обладает повышенной помехоустойчивостью, и его достаточно для определения точных координат (в случае с P-кодом было необходимо получение и кода C/A). Еще одной особенностью M-кода станет возможность его передачи для конкретной области диаметром в несколько сотен километров, где мощность сигнала будет выше на 20 децибел. Обычный сигнал М уже доступен в спутниках IIR-M, а узконаправленный будет доступен только при помощи спутников GPS-III.
C запуском спутника блока IIF введена новая частота L5 (1176.45 МГц). Этот сигнал также называют safety of life (охрана жизни человека). Сигнал на частоте L5 мощнее на 3 децибела, чем гражданский сигнал, и имеет полосу пропускания в 10 раз шире. Сигнал смогут использовать в критических ситуациях, связанных с угрозой для жизни человека. Полноценно сигнал будет использоваться после 2014 года.
Сигналы модулируются псевдослучайными последовательностями (PRN) двух типов: C/A-код и P-код. C/A (Clear access) — общедоступный код — представляет собой PRN с периодом повторения 1023 цикла и частотой следования импульсов 1023 МГц. Именно с этим кодом работают все гражданские GPS-приемники. P (Protected/precise)-код используется в закрытых для общего пользования системах, период его повторения составляет 2*1014 циклов. Сигналы, модулированные P-кодом, передаются на двух частотах: L1 = 1575,42 МГц и L2 = 1227,6 МГц. C/A-код передается лишь на частоте L1. Несущая, помимо PRN-кодов модулируется также навигационным сообщением.
| Тип спутника | GPS-II | GPS-IIA | GPS-IIR | GPS-IIRM | GPS-IIF |
| Масса, кг | 885 | 1500 | 2000 | 2000 | 2170 |
| Срок жизни | 7.5 | 7.5 | 10 | 10 | 15 |
| Бортовое время | Cs | Cs | Rb | Rb | Rb+Cs |
| Межспутниковая связь | — | + | + | + | + |
| Автономная работа, дней | 14 | 180 | 180 | 180 | >60 |
| Антирадиационная защита | — | — | + | + | + |
| Антенна | — | — | Улучшенная | Улучшенная | Улучшенная |
| Возможность настройки на орбите и мощность бортового передатчика | + | + | ++ | +++ | ++++ |
| Навигационный сигнал | L1:C/A+P L2:P | L1:C/A+P L2:P | L1:C/A+P L2:P | L1:C/A+P+M L2:C/A+P+M | L1:C/A+P+M L2:C/A+P+M L5:C |
24 спутника обеспечивают 100 % работоспособность системы в любой точке земного шара, но не всегда могут обеспечить уверенный приём и хороший расчёт позиции. Поэтому, для увеличения точности позиционирования и резерва на случай сбоев, общее число спутников на орбите поддерживается в большем количестве (31 аппарат в марте 2010 года).
Поэтому, для увеличения точности позиционирования и резерва на случай сбоев, общее число спутников на орбите поддерживается в большем количестве (31 аппарат в марте 2010 года).
Наземные станции контроля космического сегмента
Основная статья: наземный сегмент спутниковой системы навигации
Слежение за орбитальной группировкой осуществляется с главной контрольной станции, расположенной на авиабазе ВВС США Schriever, штат Колорадо, США и с помощью 10 станций слежения, из них три станции способны посылать на спутники корректировочные данные в виде радиосигналов с частотой 2000—4000 МГц. Спутники последнего поколения распределяют полученные данные среди других спутников.
Применение GPS
Основная статья: GPS-приёмник
Приёмник сигнала GPS
Несмотря на то, что изначально проект GPS был направлен на военные цели, сегодня GPS широко используются в гражданских целях. GPS-приёмники продают во многих магазинах, торгующих электроникой, их встраивают в мобильные телефоны, смартфоны, КПК и онбордеры. Потребителям также предлагаются различные устройства и программные продукты, позволяющие видеть своё местонахождение на электронной карте; имеющие возможность прокладывать маршруты с учётом дорожных знаков, разрешённых поворотов и даже пробок; искать на карте конкретные дома и улицы, достопримечательности, кафе, больницы, автозаправки и прочие объекты инфраструктуры.
Потребителям также предлагаются различные устройства и программные продукты, позволяющие видеть своё местонахождение на электронной карте; имеющие возможность прокладывать маршруты с учётом дорожных знаков, разрешённых поворотов и даже пробок; искать на карте конкретные дома и улицы, достопримечательности, кафе, больницы, автозаправки и прочие объекты инфраструктуры.
- Геодезия: с помощью GPS определяются точные координаты точек и границы земельных участков
- Картография: GPS используется в гражданской и военной картографии
- Навигация: с применением GPS осуществляется как морская, так и дорожная навигация
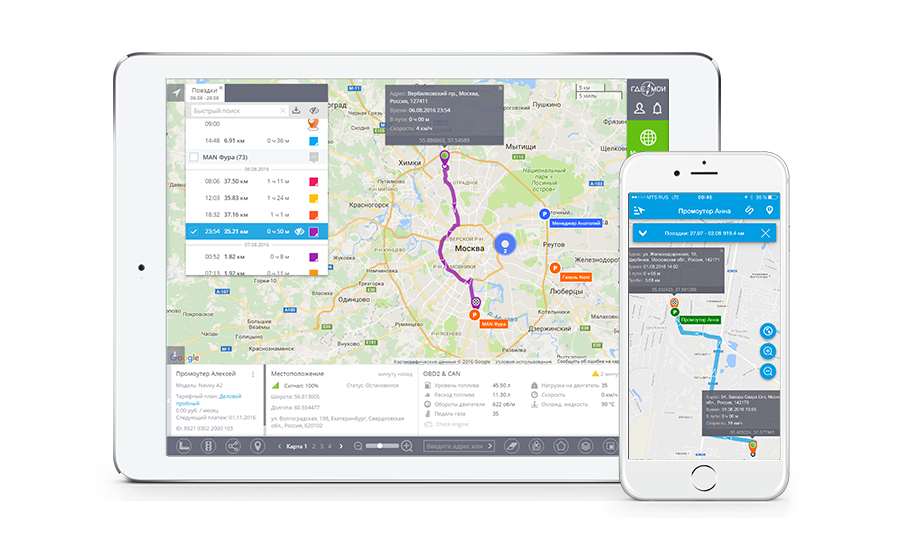
- Спутниковый мониторинг транспорта: с помощью GPS ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением
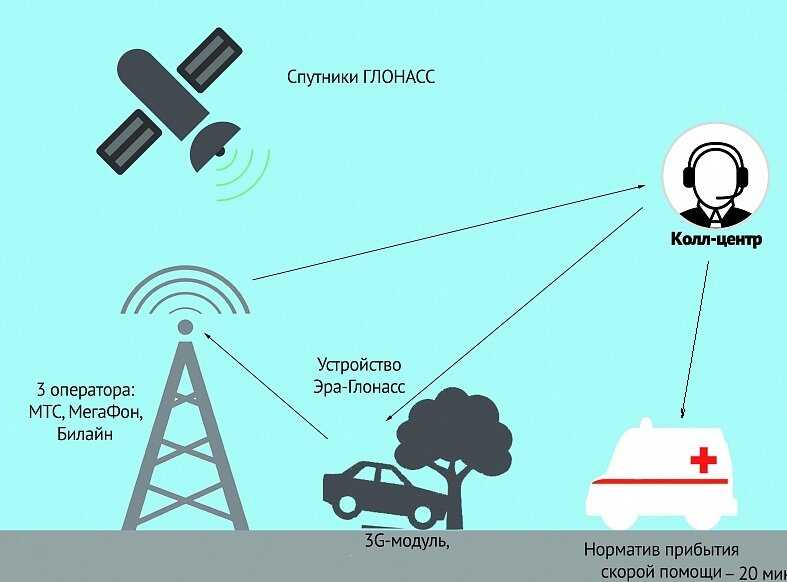
- Сотовая связь: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах, например США это используется для оперативного определения местонахождения человека, звонящего 911. В России в 2010 году начата реализация аналогичного проекта — Эра-глонасс.

- Тектоника, Тектоника плит: с помощью GPS ведутся наблюдения движений и колебаний плит[3]
- Активный отдых: есть разные игры, где применяется GPS, например, Геокэшинг и др.
- Геотегинг: информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам

Высказывались предложения об интеграции систем Iridium и GPS.[4]
Точность
См. также: DOP
Составляющие, которые влияют на погрешность одного спутника при измерении псевдодальности, приведены ниже[5]:
| Источник погрешности | Среднеквадратичное значение погрешности, м |
|---|---|
| Нестабильность работы генератора | 6,5 |
| Задержка в бортовой аппаратуре | 1,0 |
| Неопределённость пространственного положения спутника | 2,0 |
| Другие погрешности космического сегмента | 1,0 |
| Неточность эфемерид | 8,2 |
| Другие погрешности наземного сегмента | 1,8 |
| Ионосферная задержка | 4,5 |
| Тропосферная задержка | 3,9 |
| Шумовая ошибка приёмника | 2,9 |
| Многолучёвость | 2,4 |
| Другие ошибки сегмента пользователя | 1,0 |
| Суммарная погрешность | 13,1 |
Суммарная погрешность при этом не равна сумме составляющих.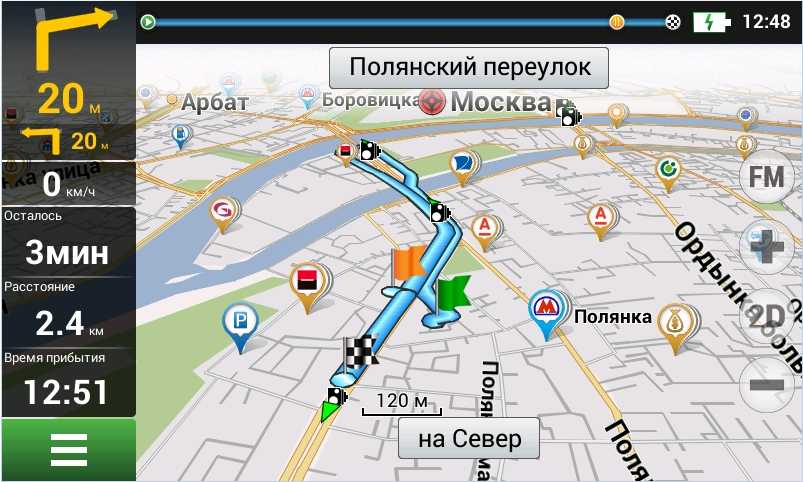
Коэффициент корреляции погрешностей двух рядом стоящих GPS приёмников(при работе в кодовом режиме) составляет 0,15-0,4 в зависимости от соотношения сигнал/шум. Чем больше соотношение сигнал/шум, тем больше корреляция. При затенении части спутников и переотражении сигнала корреляция может падать вплоть до нуля и даже отрицательных величин. Также коэффициент корреляции погрешностей зависит от геометрического фактора. При PDOP<1,5 корреляция может достигать значения 0,7. Так как погрешность GPS складывается из многих составляющих, она не может быть представлена в виде нормального белого шума. По форме распределения погрешность есть сумма нормальной погрешности, взятой с коэффициентом 0,6-0,8 и погрешности, имеющей распределение Лапласа с коэффициентом 0,2-0,4. Автокорреляция суммарной погрешности GPS падает до значения 0,5 в течении приблизительно 10 секунд[6].
Типичная точность современных GPS-приёмников в горизонтальной плоскости составляет примерно 6-8 метров при хорошей видимости спутников и использовании алгоритмов коррекции. На территории США, Канады, Японии, КНР, Европейского Союза и Индии имеются станции WAAS, EGNOS, MSAS и т. д. передающие поправки для дифференциального режима, что позволяет снизить погрешность до 1-2 метров на территории этих стран. При использовании более сложных дифференциальных режимов, точность определения координат можно довести до 10 см. Точность любой СНС сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом.
На территории США, Канады, Японии, КНР, Европейского Союза и Индии имеются станции WAAS, EGNOS, MSAS и т. д. передающие поправки для дифференциального режима, что позволяет снизить погрешность до 1-2 метров на территории этих стран. При использовании более сложных дифференциальных режимов, точность определения координат можно довести до 10 см. Точность любой СНС сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом.
В ближайшее время все аппараты нынешнего стандарта GPS будут заменены на более новую версию GPS IIF, которая имеет ряд преимуществ, в том числе они более устойчивы к помехам.
Но главное, что GPS IIF обеспечивает гораздо более высокую точность определения координат. Если нынешние спутники обеспечивают погрешность 6 метров, то новые спутники будут способны определять местоположение, как ожидается, с точностью не менее 60-90 см. Если такая точность будет не только для военных, но и для гражданских применений, то это приятная новость для владельцев GPS-навигаторов.![]()
На октябрь 2011 года на орбиту выведены первые два спутника из новой версии: GPS IIF SV-1 запущен в 2010 году и GPS IIF-2 запущен 16 июля 2011 года.
Всего первоначальный контракт предусматривал запуск 33 спутников GPS нового поколения, но потом из-за технических проблем начало запуска перенесли с 2006 года на 2010 год, а количество спутников уменьшили с 33 до 12. Все они будут выведены на орбиту в ближайшее время.
Повышенная точность спутников GPS нового поколения стала возможной благодаря использованию более точных атомных часов. Поскольку спутники перемещаются со скоростью около 14000 км/ч (3.874км/с) (первая космическая скорость на высоте 20 200 км), повышение точности времени даже в шестом знаке является критически важным для триангуляции.
Недостатки
| Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
Общим недостатком использования любой радионавигационной системы является то, что при определённых условиях сигнал может не доходить до приёмника, или приходить со значительными искажениями или задержками. Например, практически невозможно определить своё точное местонахождение в глубине квартиры внутри железобетонного здания, в подвале или в тоннеле даже профессиональными геодезическими приемниками. Так как рабочая частота GPS лежит в дециметровом диапазоне радиоволн, уровень приёма сигнала от спутников может серьёзно ухудшиться под плотной листвой деревьев или из-за очень большой облачности. Нормальному приёму сигналов GPS могут повредить помехи от многих наземных радиоисточников, а также (в редких случаях) от магнитных бурь, либо преднамеренно создаваемые «глушилками» (данный способ борьбы со спутниковыми автосигнализациями часто используется автоугонщиками).
Например, практически невозможно определить своё точное местонахождение в глубине квартиры внутри железобетонного здания, в подвале или в тоннеле даже профессиональными геодезическими приемниками. Так как рабочая частота GPS лежит в дециметровом диапазоне радиоволн, уровень приёма сигнала от спутников может серьёзно ухудшиться под плотной листвой деревьев или из-за очень большой облачности. Нормальному приёму сигналов GPS могут повредить помехи от многих наземных радиоисточников, а также (в редких случаях) от магнитных бурь, либо преднамеренно создаваемые «глушилками» (данный способ борьбы со спутниковыми автосигнализациями часто используется автоугонщиками).
Невысокое наклонение орбит GPS (примерно 55) серьёзно ухудшает точность в приполярных районах Земли, так как спутники GPS невысоко поднимаются над горизонтом.
Существенной особенностью GPS считается полная зависимость условий получения сигнала от министерства обороны США.
Теперь[когда?] Министерство обороны США решило начать полное обновление системы GPS. Оно было запланировано достаточно давно, но начать реализовывать этот проект удалось только сейчас. В ходе обновления старые спутники заменят на новые, которые разработаны и произведены компаниями Lockheed Martin и Boeing. Утверждается[источник не указан 652 дня], что они смогут обеспечивать точность позиционирования с погрешностью 0,5 метра.
Оно было запланировано достаточно давно, но начать реализовывать этот проект удалось только сейчас. В ходе обновления старые спутники заменят на новые, которые разработаны и произведены компаниями Lockheed Martin и Boeing. Утверждается[источник не указан 652 дня], что они смогут обеспечивать точность позиционирования с погрешностью 0,5 метра.
Реализация данной программы займёт некоторое[какое?] время. В Министерстве обороны США утверждают[источник не указан 652 дня], что полностью завершить обновление системы удастся только через 10 лет. Количество спутников изменено не будет, их по-прежнему будет 30: 24 работающих и 6 резервных.
Хронология
Запуск спутника GPS-IIR-14 ракетой Delta 7925. 25.09.2005, Мыс Канаверал, США
| 1973 | Решение о разработке спутниковой навигационной системы |
| 1974—1979 | Испытание системы |
| 1977 | Приём сигнала от наземной станции, симулирующей спутник системы |
| 1978—1985 | Запуск одиннадцати спутников первой группы (Block I) |
| 1979 | Сокращение финансирования программы. |
| 1980 | В связи с решением свернуть программу использования спутников Vela системы отслеживания ядерных взрывов, эти функции было решено возложить на спутники GPS. Старт первых спутников, оснащённых сенсорами регистрации ядерных взрывов. |
| 1980—1982 | Дальнейшее сокращение финансирования программы |
| 1983 | После гибели самолёта компании Korean Airline, сбитого над территорией СССР, принято решение о предоставлении сигнала гражданским службам. |
| 1986 | Гибель космического челнока Space Shuttle «Challenger» приостановила развитие программы, так как последний планировался для вывода на орбиту второй группы спутников. В результате основным транспортным средством была выбрана ракета-носитель «Дельта» |
| 1988 | Решение о развёртывании орбитальной группировки в 24 спутника. 18 спутников не в состоянии обеспечить бесперебойного функционирования системы. |
| 1989 | Активация спутников второй группы |
| 1990—1991 | Временное отключение SA (англ. selective availability — искусственно создаваемой для неавторизированных пользователей округления определения местоположения до 100 метров) в связи с войной в Персидском заливе и нехваткой военных моделей приёмников. Включение SA 01 Июня 1991 года. |
| 08.12.1993 | Сообщение о первичной готовности системы (англ. Initial Operational Capability). В этом же году принято окончательное решение о предоставлении сигнала для бесплатного пользования гражданским службам и частным лицам |
| 1994 | Спутниковая группировка укомплектована |
| 17.07.1995 | Полная готовность системы (англ. Full Operational Capability) |
| 01.05.2000 | Отключение SA для гражданских пользователей, таким образом точность определения выросла со 100 до 20 метров |
26. 06.2004 06.2004 | Подписание совместного заявления по обеспечению взаимодополняемости и совместимости Galileo и GPS 1 |
| Декабрь 2006 | Российско-американские переговоры по сотрудничеству в области обеспечения взаимодополняемости космических навигационных систем ГЛОНАСС и GPS.² |
См. также
- Transit (первая спутниковая навигационная система, 1960-е — 1996)
- Galileo (европейская навигационная система)
- ГЛОНАСС (российская навигационная система)
- Космическая геодезия
- Location-based service
- GPS-приёмник
- GPS-навигатор
- A-GPS
Примечания
- ↑ United States Updates Global Positioning System Technology
- ↑ GPS-гонка: России не хватает спутников, cnews.ru, 4 июня 2003 г
- ↑ GPS Time Series
- ↑ Спутниковая суперсистема создается армией США » Военное обозрение
- ↑ Анучин О.Н., Емельянцев Г. И. Интегрированные системы ориентации для морских подвижных объектов / Под ред. В. Г. Пешехонова. — 2-е изд. — Спб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2003. — С. 160-161. — 390 с. — ISBN 5-900780-47-3
- ↑ Горбачёв А. Ю. Математическая модель погрешностей gps // Авиакосмическое приборостроение. — М.: «НАУЧТЕХЛИТИЗДАТ», 2010. — № 5.
 И. Интегрированные системы ориентации для морских подвижных объектов / Под ред. В. Г. Пешехонова. — 2-е изд. — Спб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2003. — С. 160-161. — 390 с. — ISBN 5-900780-47-3
И. Интегрированные системы ориентации для морских подвижных объектов / Под ред. В. Г. Пешехонова. — 2-е изд. — Спб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2003. — С. 160-161. — 390 с. — ISBN 5-900780-47-3Литература
- Александров И. Космическая радионавигационная система НАВСТАР (рус.) // Зарубежное военное обозрение. — М., 1995. — № 5. — С. 52-63. — ISSN 0134-921X.
- Козловский Е. Искусство позиционирования // Вокруг света. — М., 2006. — № 12 (2795). — С. 204-280.
- Шебшаевич В. С., Дмитриев П. П., Иванцев Н. В. и др. Сетевые спутниковые радионавигационные системы / под ред. В. С. Шебшаевича. — 2-е изд., перераб. и доп. — М.: Радио и связь, 1993. — 408 с. — ISBN 5-256-00174-4
Ссылки
- Официальные документы и спецификации
- Официальный сайт правительства США и системы GPS со статусом спутниковой группировки (англ. )
 )
)- Объяснения работы
- Глобальные Навигационные Спутниковые Системы (GNSS). Как это работает?, gps-club.ru
- Совместимость с Gallileo и ГЛОНАСС
- Совместное заявление по обеспечению взаимодополняемости и совместимости Галилео и GPS (англ.)
- Совместное заявление по обеспечению взаимодополняемости и совместимости ГЛОНАСС и GPS ((недоступная ссылка), копия)
- Разное
- GPS изнутри: описание NMEA протокола
Система GPS — анимационная визуализация Google Maps KMZ (файл меток KMZ для Google Earth)
| В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. |
Инструмент состояния процесса виртуальной машины Java
Перейти к
Содержание
- Краткое содержание
- Параметры
- Описание
- Опции
- Идентификатор хоста
- Формат вывода
- Примеры
- См. также
 также
такжеОБЗОР
jps [ опции ] [ hostid ]
ПАРАМЕТРЫ
-
опции - Параметры командной строки.
-
идентификатор хоста - Идентификатор хоста хоста
для которого должен быть создан отчет о процессе. Хост
могут включать необязательные компоненты, указывающие на связь
протокол, номер порта и другие данные, специфичные для реализации.
ОПИСАНИЕ
Инструмент jps перечисляет инструментированные HotSpot Java Virtual
Машины (JVM) в целевой системе. Инструмент ограничен
предоставление информации о JVM, к которым у него есть доступ
разрешения.
Если jps запускается без указания хоста , он будет
ищите инструментированные JVM на локальном хосте. Если начать с
hostid , он будет искать JVM на указанном хосте, используя
указанный протокол и порт. Предполагается, что процесс jstatd
для работы на целевом хосте.
Команда jps сообщит идентификатор локальной виртуальной машины или
lvmid для каждой инструментированной JVM, обнаруженной в целевой системе.
lvmid обычно, но не обязательно, является рабочим
идентификатор процесса системы для процесса JVM. Без вариантов,
jps перечислит lvmid каждого Java-приложения, за которым следует
по краткой форме имени класса приложения или имени файла jar.
В краткой форме имени класса или имени файла JAR опускается имя класса.
информация о пакете или информация о пути к файлам JAR.
Команда jps использует программу запуска java для поиска
имя класса и аргументы, переданные в основной метод . Если
целевая JVM запускается с помощью специальной программы запуска, имя класса
(или имя файла JAR) и аргументы для основного
метод будет недоступен. В этом случае команда jps
выведет строку Unknown для имени класса или JAR
имя файла и аргументы основного метода.
Список JVM, созданный командой jps , может быть
ограничено разрешениями, предоставленными принципалу, выполняющему
команда. Команда выведет список только тех JVM, для которых
принцип имеет права доступа, определенные операционной системой
специальные механизмы контроля доступа.
ПРИМЕЧАНИЕ. Эта утилита не поддерживается и может быть недоступна.
доступны в будущих версиях JDK. В настоящее время это не
доступно на платформах Windows 98 и Windows ME.
ОПЦИИ
Команда jps поддерживает ряд параметров, которые изменяют
вывод команды. Эти параметры могут быть изменены или
удаление в будущем.
- -q
- Подавить вывод имени класса, имени файла JAR и
аргументы, переданные восновной метод, производящий только
список локальных идентификаторов ВМ. - -м
- Вывести аргументы, переданные основному методу. Результат может
быть нулевым для встроенных JVM. - -л
- Вывести полное имя пакета для основного класса приложения
или полный путь к JAR-файлу приложения. - -в
- Вывод аргументов, переданных JVM.
- -В
- Вывод аргументов, переданных в JVM через файл флагов
(файл .hotspotrc или файл, указанный
-XX:Flags=< имя файла > аргумент). - -J опция
- Передать параметр в программу запуска java , вызываемую
йпс . Например, -J-Xms48m устанавливает загрузочную память
до 48 мегабайт. Это обычное соглашение для -J пройти
параметры базовой виртуальной машины, выполняющей приложения, написанные на
Ява.

ХОСТ
IDENTIFIER
Идентификатор хоста или hostid — это строка, указывающая
целевая система. Синтаксис строки hostid в основном
соответствует синтаксису URI:
[ протокол :][[//] имя хоста ][: порт ][/ имя сервера ]
-
протокол - Протокол связи. Если протокол опущен
и имя хоста не указано, протокол по умолчанию
специфичный для платформы оптимизированный локальный протокол. Если
протокол опущен и указано имя хоста , тогда
протокол по умолчанию rmi . -
имя хоста - Имя хоста или IP-адрес, указывающий целевой хост. Если
имя хоста опущено, тогда целевой хост является локальным
хозяин. -
порт - Порт по умолчанию для связи с удаленным сервером. Если
имя хоста опущено или протокол указывает
оптимизированный, локальный протокол, то порт игнорируется. В противном случае,
обработка параметра порта зависит от реализации.
Для протокола rmi по умолчанию порт указывает
номер порта для реестра rmire на удаленном хосте. Если порт
опущен, а протокол указывает rmi , то
по умолчанию используется порт rmiregistry (1099). -
имя сервера - Обработка этого параметра зависит от реализации.
Для оптимизированного локального протокола это поле игнорируется. Для
rmi , этот параметр представляет собой строку, представляющую
имя удаленного объекта RMI на удаленном хосте. См. -н
вариант для jstatd
команда.
 Если
Если Для
Для ВЫХОД
FORMAT
Вывод команды jps выглядит следующим образом:
шаблон:
lvmid [ [ имя класса | JARfilename | "Неизвестно"] [ arg * ] [ jvmarg * ] ]
Где все выходные токены разделены пробелом. Ан
arg , который включает встроенные пробелы, представит
двусмысленность при попытке сопоставить аргументы с их фактическими
позиционные параметры.
ПРИМЕЧАНИЕ : рекомендуется не писать скрипты для разбора
jps Вывод , так как формат может измениться в будущих версиях.
Если вы решите написать сценарии, которые анализируют вывод jps , ожидайте
изменить их для будущих выпусков этого инструмента.
ПРИМЕРЫ
В этом разделе приведены примеры команды jps .
Список инструментированных JVM на локальном хосте:
jps
18027 Java2Demo.JAR
18032 jps
18005 jstat
Список инструментированных JVM на удаленном хосте:
В этом примере предполагается, что сервер jstat и либо
его внутренний реестр RMI или отдельный внешний rmiregistry
процессы выполняются на удаленном хосте на порту по умолчанию (порт
1099). Также предполагается, что локальный хост имеет соответствующие
разрешения на доступ к удаленному хосту. Этот пример также включает
параметр -l для вывода длинной формы имен классов или
Имена JAR-файлов.
jps -l remote.domain
3002 /opt/jdk1.7.0/demo/jfc/Java2D/Java2Demo.JAR
2857 sun.tools.jstatd.jstatd
Список инструментированных JVM на удаленном хосте с
нестандартный порт для реестра RMI
В этом примере предполагается, что сервер jstatd с
внутренний реестр RMI, привязанный к порту 2002, работает на удаленном
хозяин. В этом примере также используется параметр -m для включения
В этом примере также используется параметр -m для включения
аргументы, переданные в основной метод каждого из перечисленных
Java-приложения.
jps -m remote.domain:2002
3002 /opt/jdk1.7.0/demo/jfc/Java2D/Java2Demo.JAR
3102 sun.tools.jstatd.jstatd -p 2002
СМОТРИТЕ ТАКЖЕ
- java — Java-приложение
Пусковая установка - jstat — виртуальная машина Java
Инструмент мониторинга статистики - jstatd — демон jstat
- rmiregistry — Java
Реестр удаленных объектов
jps
Список инструментированных виртуальных машин Java (JVM) в целевой системе. Эта команда является экспериментальной и не поддерживается.
Сводка
jps [ варианты ] [ hostid ]
- варианты
Параметры командной строки. См. Опции.
- идентификатор хоста
Идентификатор хоста, для которого должен быть сгенерирован отчет о процессе.
hostidможет включать необязательные компоненты, которые указывают протокол связи, номер порта и другие данные, специфичные для реализации. См. Идентификатор хоста.

Описание
Команда jps выводит список инструментированных виртуальных машин Java HotSpot в целевой системе. Команда ограничена предоставлением информации о JVM, для которых у нее есть разрешения на доступ.
Если команда jps запускается без указания идентификатора хоста , затем он ищет инструментированные JVM на локальном хосте. Если запущен с идентификатором хоста , он ищет JVM на указанном хосте, используя указанный протокол и порт. Предполагается, что на целевом хосте запущен процесс jstatd .
Команда jps сообщает локальный идентификатор JVM или lvmid для каждой инструментированной JVM, обнаруженной в целевой системе.
lvmid обычно, но не обязательно, является идентификатором процесса операционной системы для процесса JVM. Без вариантов, jps перечисляет lvmid каждого Java-приложения, за которым следует краткая форма имени класса приложения или имени файла jar. В краткой форме имени класса или имени файла JAR отсутствует информация о пакете класса или информация о пути к файлам JAR.
Команда jps использует средство запуска Java для поиска имени класса и аргументов, переданных в основной метод. Если целевая JVM запускается с пользовательской программой запуска, то имя класса или файла JAR и аргументы для основной метод недоступен. В этом случае команда jps выводит строку Unknown для имени класса или имени файла JAR и для аргументов основного метода .
Список виртуальных машин JVM, созданных командой jps , может быть ограничен разрешениями, предоставленными участнику, выполняющему команду. Команда только перечисляет JVM, для которых принцип имеет права доступа, как определено механизмами контроля доступа операционной системы.
Команда только перечисляет JVM, для которых принцип имеет права доступа, как определено механизмами контроля доступа операционной системы.
Параметры
Команда jps поддерживает ряд параметров, изменяющих вывод команды. Эти параметры могут быть изменены или удалены в будущем.
- -q
Подавляет вывод имени класса, имени файла JAR и аргументов, переданных в основной метод
- -м
Отображает аргументы, переданные в
основной метод. Вывод может бытьnullдля встроенных JVM.- -л
Отображает полное имя пакета для основного класса приложения
или полное имя пути к JAR-файлу приложения.- -в
Отображает аргументы, переданные JVM.
- -В
Подавляет вывод имени класса, имени файла JAR и аргументов, переданных в основной метод, создавая только список локальных идентификаторов JVM.
- -J
опция Передает параметр
-J-Xms48mустанавливает загрузочную память на 48 МБ. См.java(1).

Идентификатор хоста
Идентификатор хоста или hostid — это строка, указывающая целевую систему. Синтаксис 9Строка 0372 hostid соответствует синтаксису URI:
[протокол:][[//]имя хоста][:порт][/имя_сервера]
- протокол
Протокол связи. Если протокол
rmi.- имя хоста
Имя хоста или IP-адрес, указывающий на целевой хост. Если вы опустите параметр
hostname, то целевой хост будет локальным хостом.- порт
Порт по умолчанию для связи с удаленным сервером. Если параметр
hostnameопущен или параметрпротоколуказывает оптимизированный локальный протокол, то параметрпортигнорируется. В противном случае лечение 9Параметр 0372 порта зависит от реализации. Для протоколаrmiпо умолчанию параметрportуказывает номер порта для реестра rmi на удаленном хосте. Если параметрпортопущен, а параметрпротоколауказываетrmi, то используется порт rmiregistry по умолчанию (1099).- имя сервера
Обработка этого параметра зависит от реализации.
Для оптимизированного локального протокола это поле игнорируется. Для rmi, этот параметр представляет собой строку, представляющую имя удаленного объекта RMI на удаленном хосте. Для получения дополнительной информации см. командуjstatd-n.

 Для оптимизированного локального протокола это поле игнорируется. Для
Для оптимизированного локального протокола это поле игнорируется. Для Формат вывода
Вывод команды jps соответствует следующему шаблону:
lvmid [[имя класса | JARимя_файла | "Неизвестно"] [arg*] [jvmarg*]]
Все выходные токены разделены пробелом. значение arg , включающее встроенные пробелы, приводит к неоднозначности при попытке сопоставить аргументы с их фактическими позиционными параметрами.
Примечание: Не рекомендуется писать сценарии для анализа вывода jps , поскольку формат может измениться в будущих выпусках. Если вы пишете сценарии, которые анализируют вывод jps , ожидайте изменения их для будущих выпусков этого инструмента.![]()
Примеры
В этом разделе приведены примеры jps команда.
Список инструментированных JVM на локальном хосте:
jps 18027 Java2Demo.JAR 18032 джпс 18005 jstat
В следующем примере перечислены инструментированные JVM на удаленном узле. В этом примере предполагается, что сервер jstat и либо его внутренний реестр RMI, либо отдельный внешний процесс rmiregistry выполняются на удаленном хосте через порт по умолчанию (порт 1099). Также предполагается, что локальный хост имеет соответствующие разрешения для доступа к удаленному хосту. Этот пример также включает -l опция для вывода длинной формы имен классов или имен файлов JAR.
jps -l удаленный.домен 3002 /opt/jdk1.7.0/demo/jfc/Java2D/Java2Demo.JAR 2857 солнце.инструменты.jstatd.jstatd
В следующем примере перечислены инструментированные JVM на удаленном узле с портом, отличным от порта по умолчанию для реестра RMI.